AVR 学习笔记十六、舵机控制实验 -------基于 LT_Min i_M16 16
1 舵机控制实验 舵机的英文名称是 Serv o,舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素
舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出 使得单片机系统非常容易与之接口
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统
目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍
舵机是一种俗称,其实是一种伺服马达
下面是一种舵机的实物图: 图 1 舵机实物图 本实例利用 AVR单片机 ATmega16来实现单片机对舵机的简单控制
本实例有 3个功能模块,分别是: ● 单片机系统:使用 ATmega16单片机输出脉冲信号到舵机的信号接收端,通过脉冲信号实现对舵机的转动控制
● 外围电路:舵机控制电路
● 程序设计:编写程序实现对舵机的控制
通过本实例,掌握以下知识点: ● 单片机如何实现对舵机的控制
● 舵机的工作原理和控制方法
● 编写软件,实现对舵机的控制
2 器件和原理 1 6
1 舵机的结构和工作原理 舵机是伺服控制系统里最常用的执行机构,其内实际上也是下个闭环的控制系统
舵机只在一根信号线就可以实现机械角度的控制
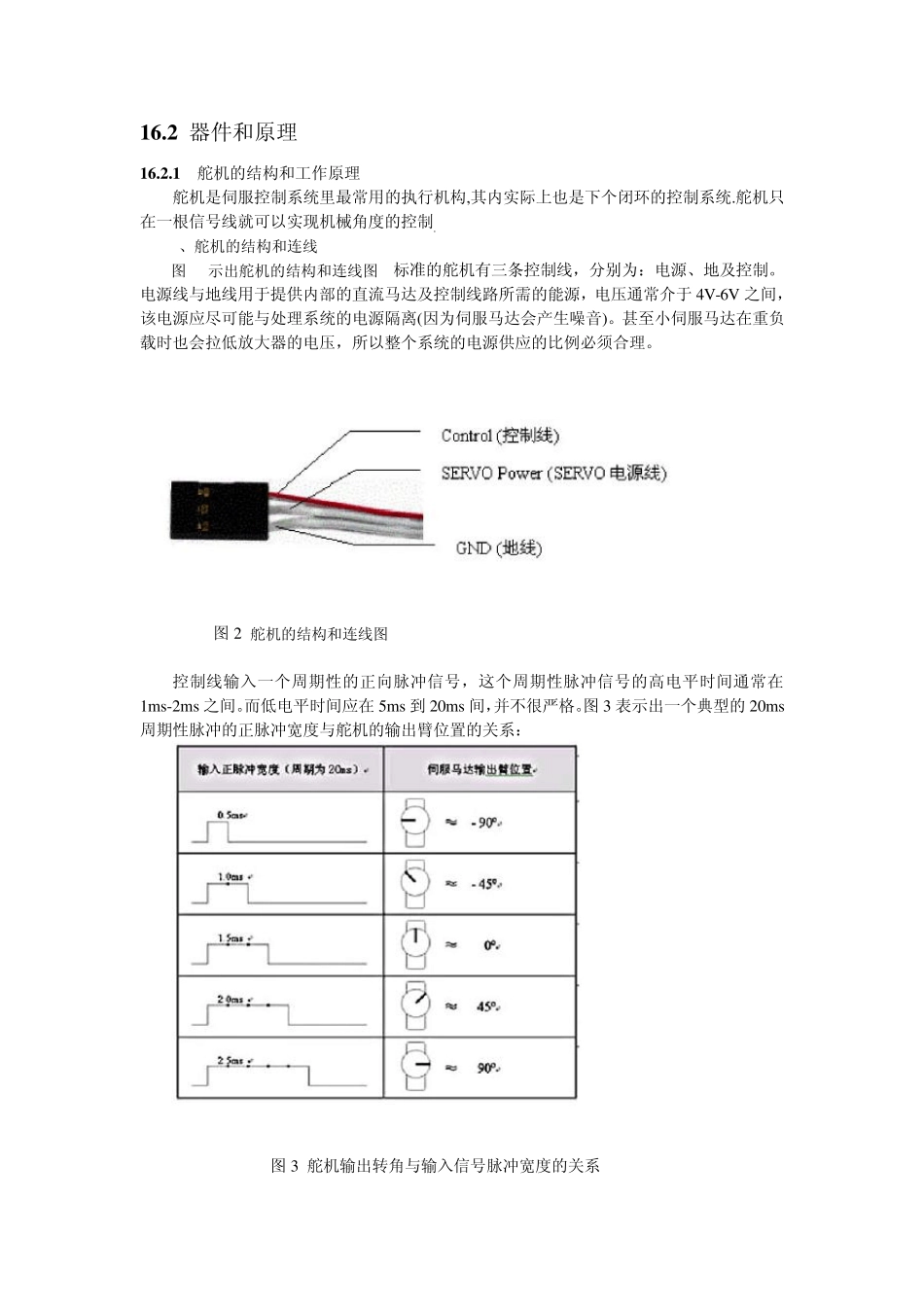
1、舵机的结构和连线 图 2示出舵机的结构和连线图, 标准的舵机有三条控制线,分别为:电源、地及控制
电源线与地线用于提供内部的直流马达及控制线路所需的能源,电压通常介于 4V-6V 之间,该电源应尽可能与处理系统的电源隔离(因为伺服马达会产生噪音)
甚至小伺服马达在重负载时也会拉低放大器的电压,所以整个系统的电源供应的比例必须合理
图 2 舵机的结构和连