附件1:CAN 通讯协议 系统中电机控制器通过CAN 总线接受整车控制器控制指令,通讯协议满足SAE J1939 以及CAN 2
0B 标准,通讯波特率为250Kps
网络硬件的要求 通信电缆应尽量离开动力线(0
5m 以上)、离开12V 控制线(0
1m 以上)
电缆屏蔽层在车内连续导通,建议每个部件的网络插座有屏蔽层的接头,屏蔽层仅与主控制器控制地单端可靠相连
网络硬件的要求 通信电缆应尽量离开动力线(0
5m 以上),离开12V 控制线(0
1m 以上)
电缆屏蔽层在车内连续导通,建议每个部件的网络插座有屏蔽层的接头,屏蔽层仅与主控制器控制地单端可靠相连
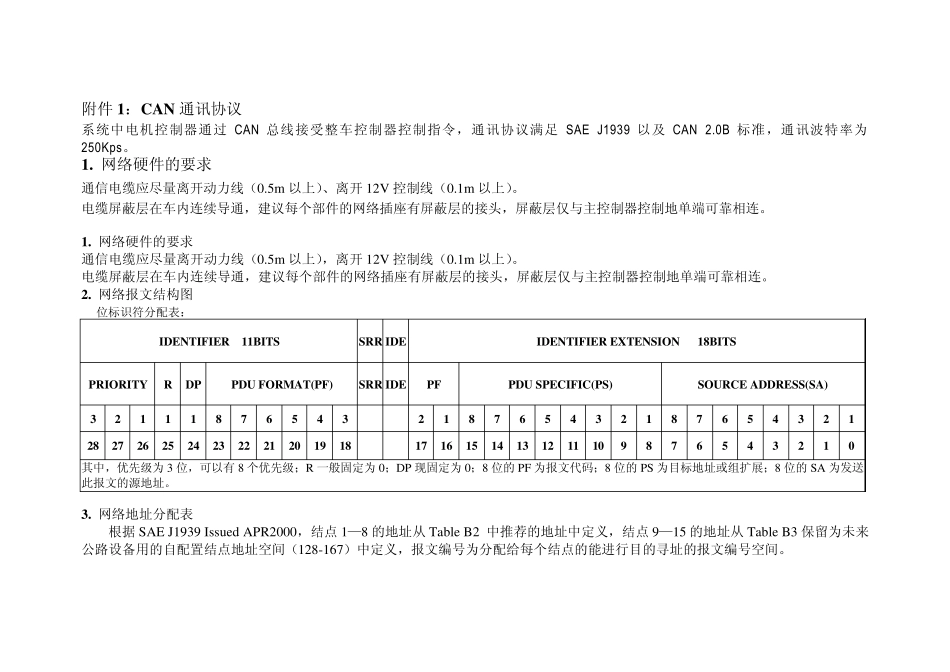
网络报文结构图 29位标识符分配表: IDENTIFIER 11BITS SRR IDE IDENTIFIER EXTENSION 18BITS PRIORITY R DP PDU FORMAT(PF) SRR IDE PF PDU SPECIFIC(PS) SOURCE ADDRESS(SA) 3 2 1 1 1 8 7 6 5 4 3 2 1 8 7 6 5 4 3 2 1 8 7 6 5 4 3 2 1 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 其中,优先级为3 位,可以有8 个优先级;R 一般固定为0;DP 现固定为0;8 位的PF 为报文代码;8 位的PS 为目标地址或组扩展;8 位的SA 为发送此报文的源地址
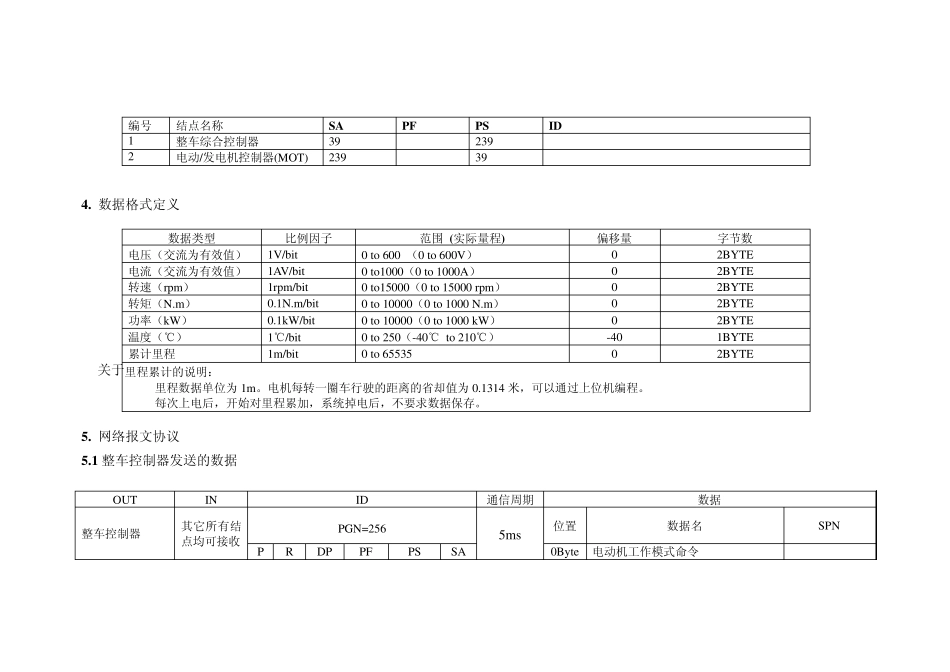
网络地址分配表 根据SAE J1939 Issued APR2000,结点1—8 的地址从 Table B2 中推荐的地址中定义,结点9—15 的地址从 Table B3 保留为未来公路设备用的自配置结点地址空间(128-167)中定义,报文编号为分配给