数字PID控制器的工程实现 1
3 数字PID控制器的工程实现 前面两节分别讨论了数字PID控制算法及其改进措施,为编制PID程序提供了算式,这是数字PID控制器的核心问题
如果计算机仅实现此算式,并不能完全满足实际控制的需要,还必须考虑其他工程实际问题,才能使 PID控制程序具有通用性和实用价值
众所周知,电动仪表中的模拟 PID调节器是一台硬设备
与之相比,计算机中的数字PID控制器却是一台软设备,也就是说,它是由一段 PID程序来实现的
一台模拟调节器只能控制一个回路,而一段 PID控制程序却可以作为一台计算机所控制的所有 PID控制回路的公共子程序
所不同的只是各个控制回路提供的原始数据不一样,输入输出通道也不一样
为此,必须给每个 PID控制回路提供一段内存数据区(亦称线性表),以便存放各种信息参数
既然 PID控制程序是公共子程序,那就应该具有通用性和工程实用价值
在设计 PID控制程序时,必须考虑各种工程实际情况,并含有多种功能,以便用户选择
计算机控制中的数字PID控制器是由 PID控制程序及相应的数据区构成的,本书称它为PID控制块
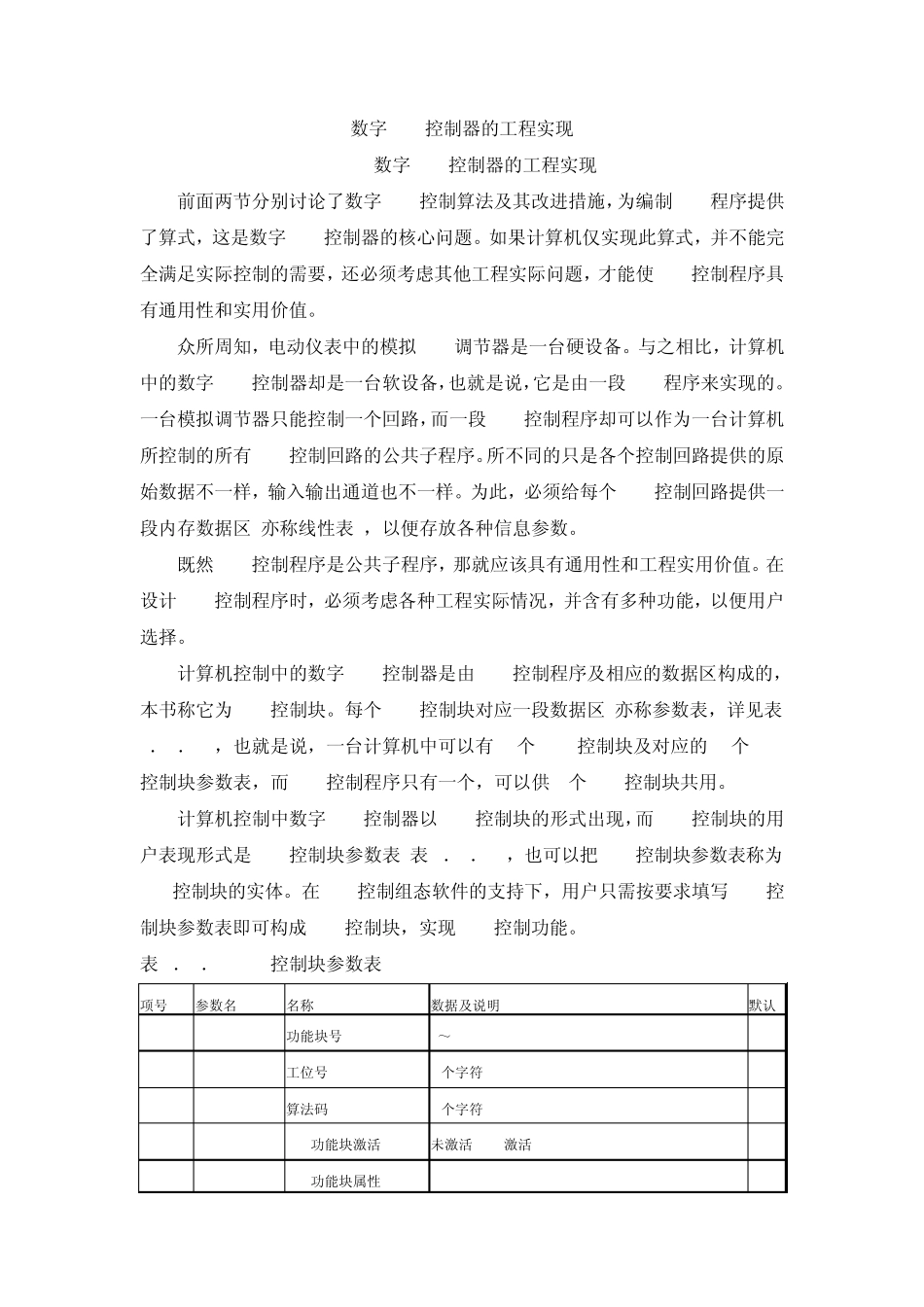
每个 PID控制块对应一段数据区(亦称参数表,详见表 1.3.1),也就是说,一台计算机中可以有 n个 PID控制块及对应的n个 PID控制块参数表,而 PID控制程序只有一个,可以供n个 PID控制块共用
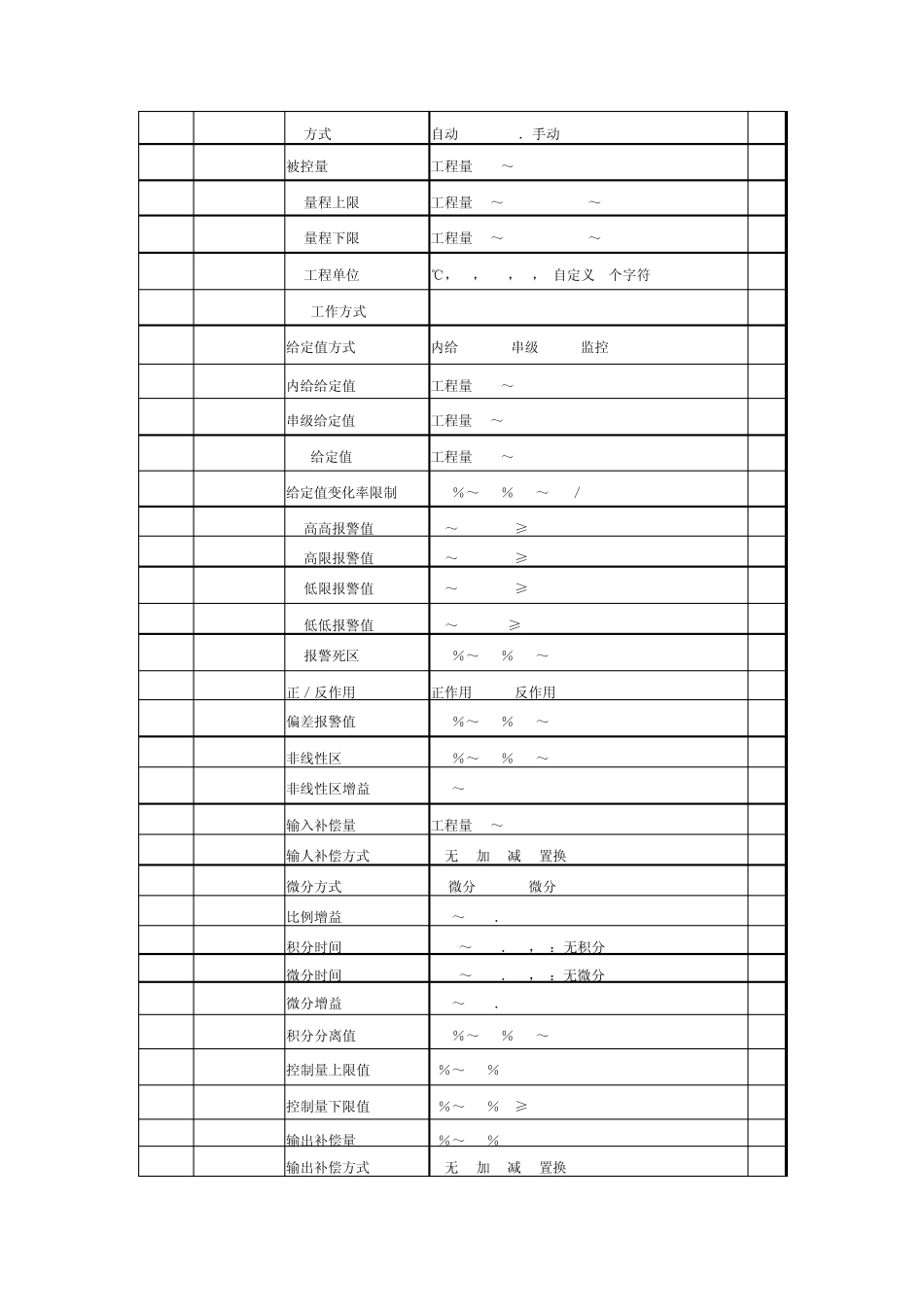
计算机控制中数字PID控制器以 PID控制块的形式出现,而 PID控制块的用户表现形式是PID控制块参数表(表 1.3.1),也可以把 PID控制块参数表称为PID控制块的实体
在 PID控制组态软件的支持下,用户只需按要求填写 PID控制块参数表即可构成 PID控制块,实现PID控制功能
表 1.3.1 PID控制块参数表 项号 参数名 名称 数据及说明 默认 1 N0 功能块号 O~255 2 TAGNAME