下载后可任意编辑双块式无碴轨道轨道精调作业指导书一、工作内容 1.1 检查使用状态 1.2 进行轨道精调作业 1.3 设备保养二、设备组成 2.1 硬件部分硬件主要由机械和电气测量两部分组成
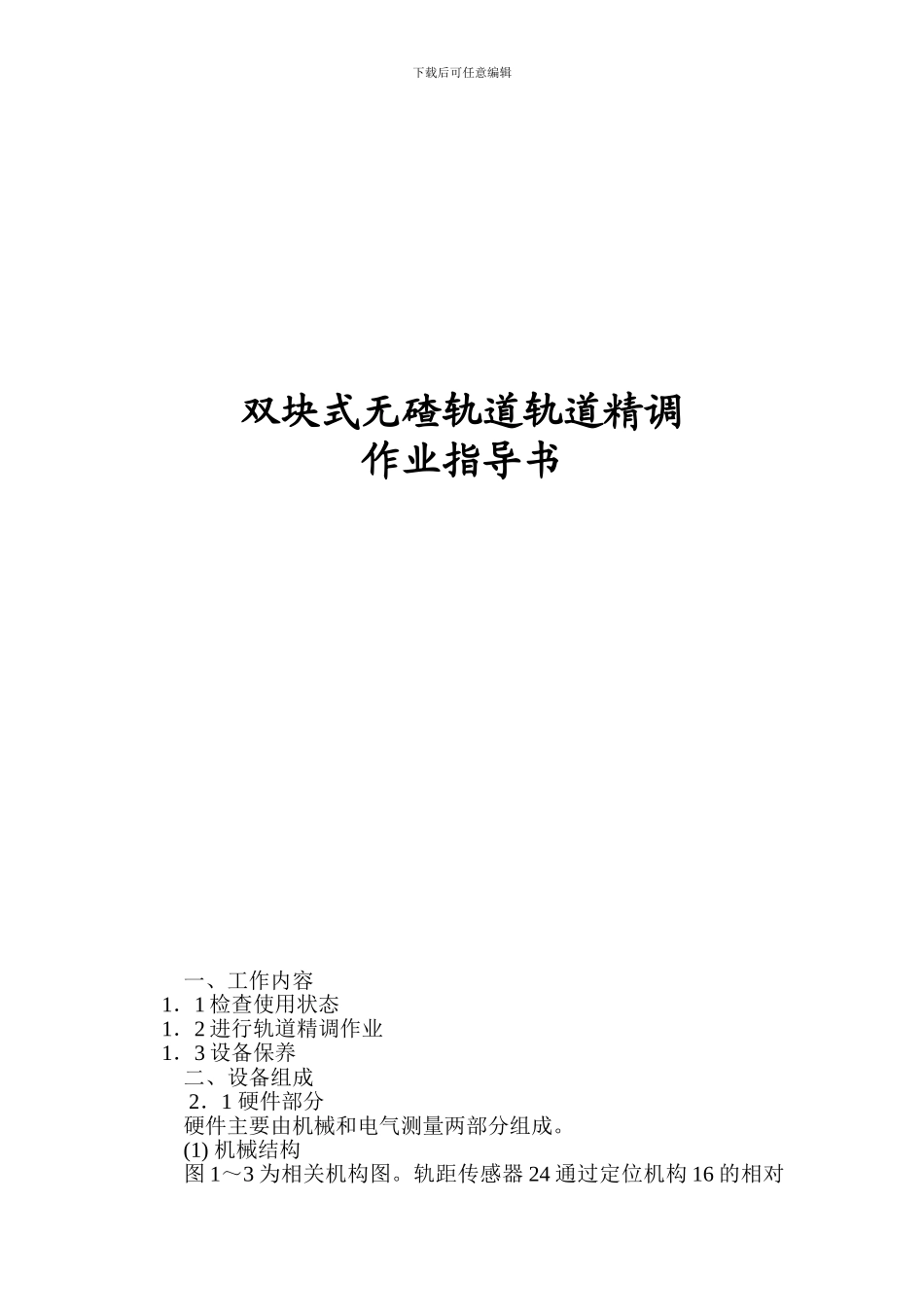
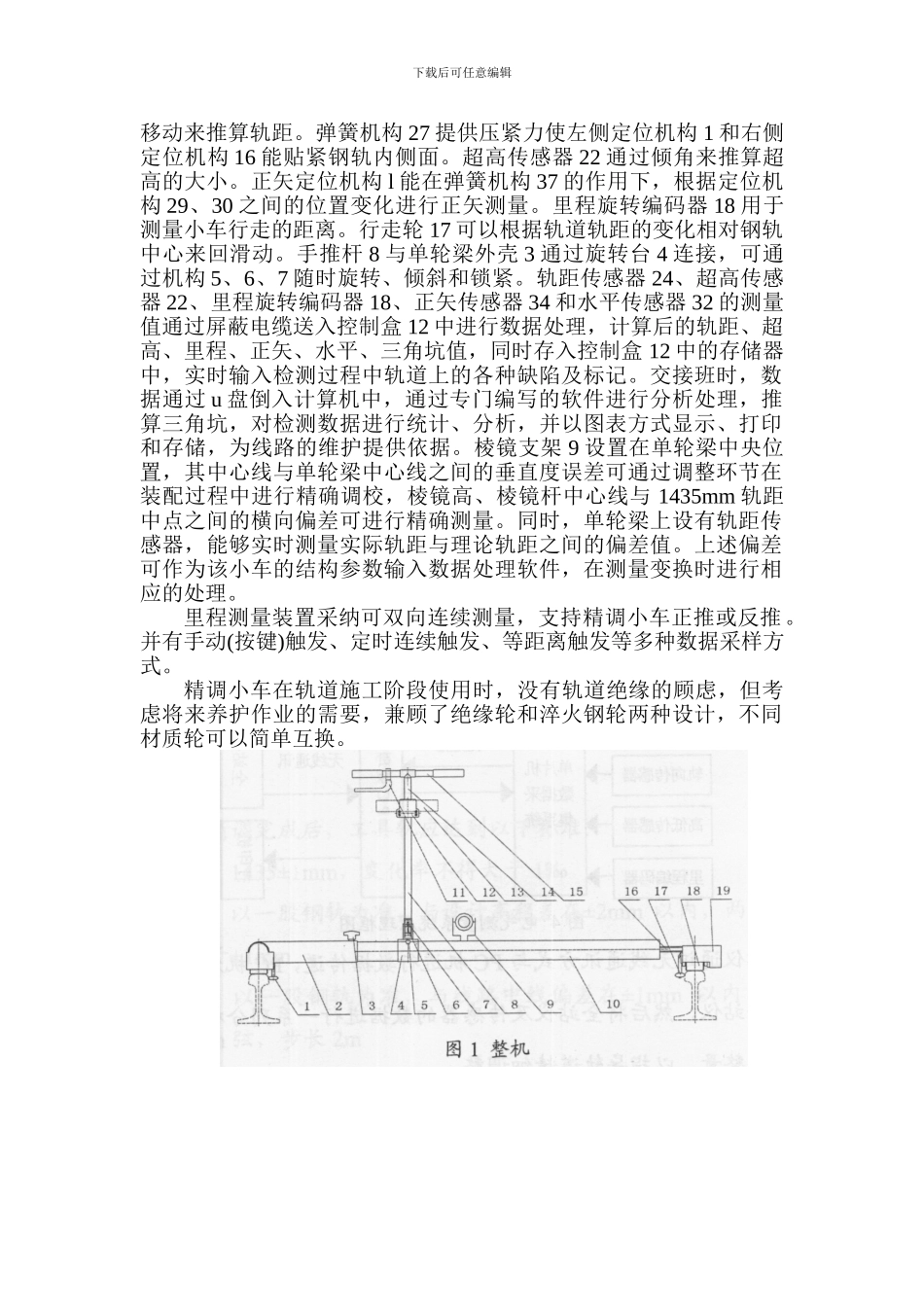
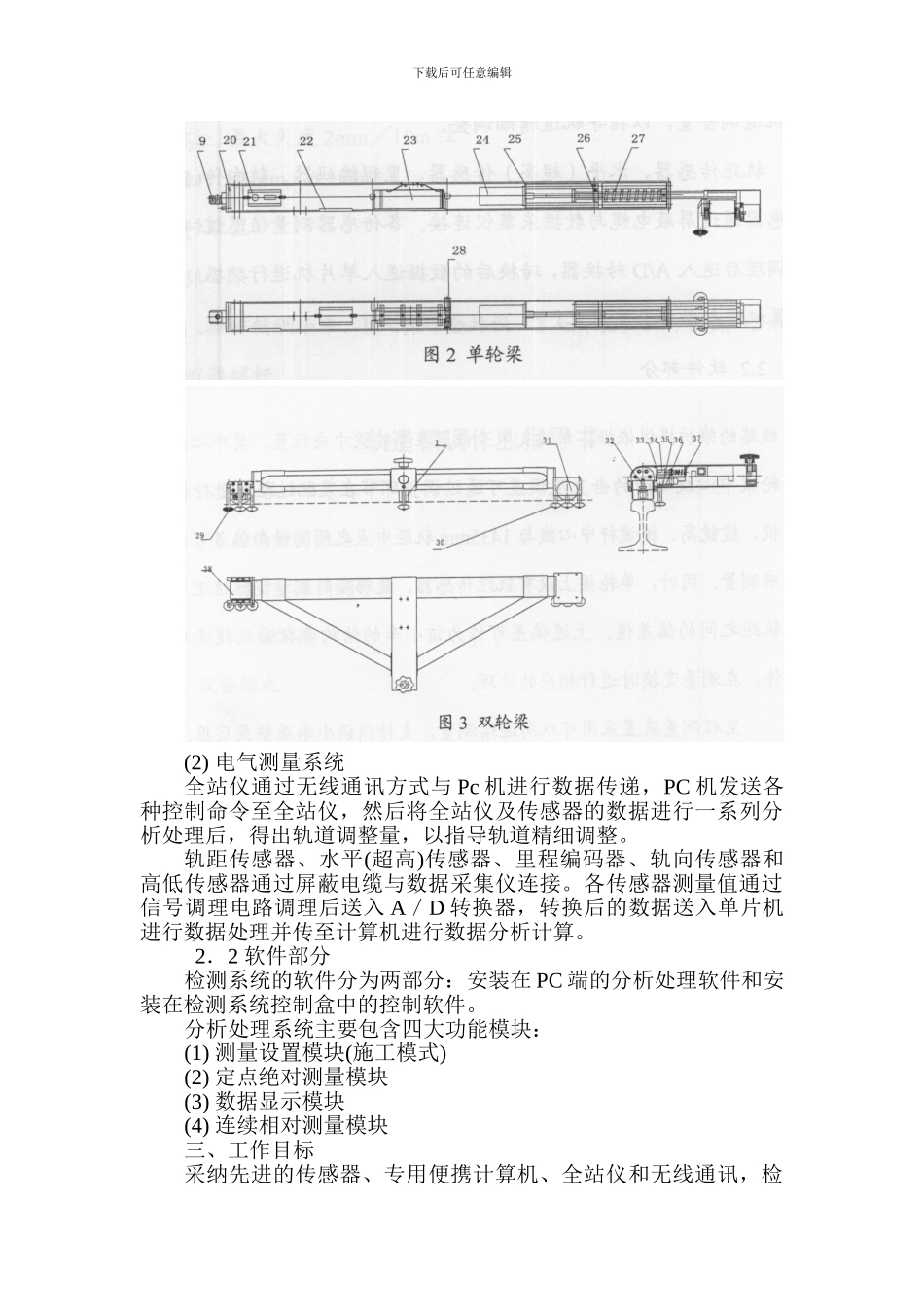
(1) 机械结构图 1~3 为相关机构图
轨距传感器 24 通过定位机构 16 的相对下载后可任意编辑移动来推算轨距
弹簧机构 27 提供压紧力使左侧定位机构 1 和右侧定位机构 16 能贴紧钢轨内侧面
超高传感器 22 通过倾角来推算超高的大小
正矢定位机构 l 能在弹簧机构 37 的作用下,根据定位机构 29、30 之间的位置变化进行正矢测量
里程旋转编码器 18 用于测量小车行走的距离
行走轮 17 可以根据轨道轨距的变化相对钢轨中心来回滑动
手推杆 8 与单轮梁外壳 3 通过旋转台 4 连接,可通过机构 5、6、7 随时旋转、倾斜和锁紧
轨距传感器 24、超高传感器 22、里程旋转编码器 18、正矢传感器 34 和水平传感器 32 的测量值通过屏蔽电缆送入控制盒 12 中进行数据处理,计算后的轨距、超高、里程、正矢、水平、三角坑值,同时存入控制盒 12 中的存储器中,实时输入检测过程中轨道上的各种缺陷及标记
交接班时,数据通过 u 盘倒入计算机中,通过专门编写的软件进行分析处理,推算三角坑,对检测数据进行统计、分析,并以图表方式显示、打印和存储,为线路的维护提供依据
棱镜支架 9 设置在单轮梁中央位置,其中心线与单轮梁中心线之间的垂直度误差可通过调整环节在装配过程中进行精确调校,棱镜高、棱镜杆中心线与 1435mm 轨距中点之间的横向偏差可进行精确测量
同时,单轮梁上设有轨距传感器,能够实时测量实际轨距与理论轨距之间的偏差值
上述偏差可作为该小车的结构参数输入数据处理软件,在测量变换时进行相应的处理
里程测量装置采纳可双向连续测量,支持精调小车正推或反推
并有手动(按键)触发、