下载后可任意编辑 基于 PLC 控制的液压控制系统 [ 摘要] 采纳可编程控制器(PLC)代替继电器控制器,对机械手的液压驱动系统进行控制,通过输入输出接口建立与机械手液压系统开关量和模拟量的联系,实现机械手搬运工件的顺序动作和自动控制,达到准确度高、控制方便、可靠性好的目标,大大提高了生产率和自动化程度,减少了系统故障,具有很强的有用性
[ 关键词] PLC;液压控制;机械手 1、 前言( Introduction) 目前 PLC 在工业生产过程控制自动化和传统产业技术改造等方面得到了广泛应用, 与传统的继电器控制相比, PLC 具有控制系统构成简单、可靠性高、通用性强、抗干扰能力强、易于编程、体积小、可在线修改、设计与调试周期短、便于安装和维修等突出优点, 而且一般不需要实行什么特别措施, 就能直接在工业环境中使用, 更加适合工业现场的要求, 使用PLC 控制液压控制系统能提高系统的整体性能,具有较明显的优越性
本文介绍基于 PLC 控制的某液压机械手的典型液压控制回路及其 PLC 控制方法
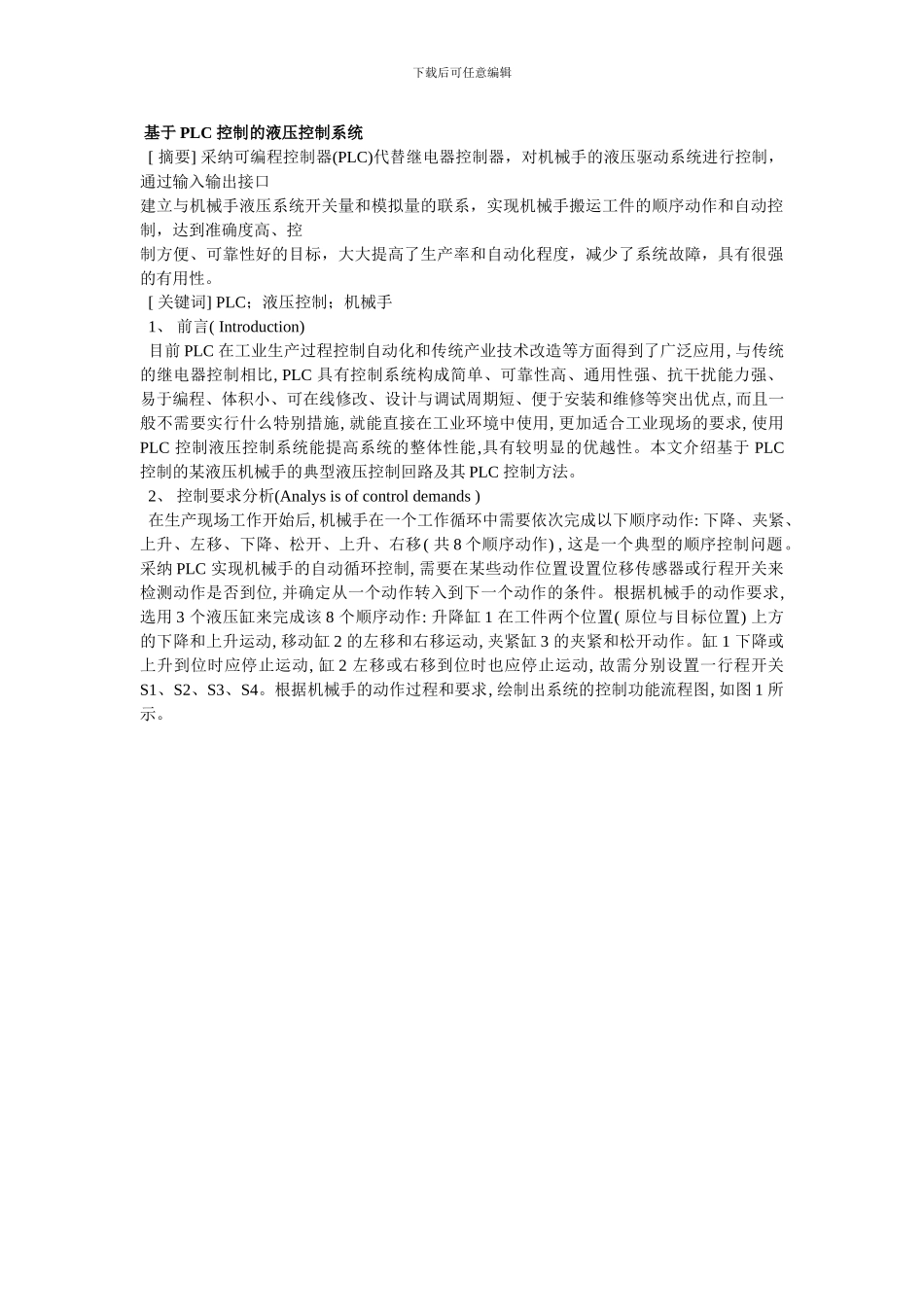
2、 控制要求分析(Analys is of control demands ) 在生产现场工作开始后, 机械手在一个工作循环中需要依次完成以下顺序动作: 下降、夹紧、上升、左移、下降、松开、上升、右移( 共 8 个顺序动作) , 这是一个典型的顺序控制问题
采纳 PLC 实现机械手的自动循环控制, 需要在某些动作位置设置位移传感器或行程开关来检测动作是否到位, 并确定从一个动作转入到下一个动作的条件
根据机械手的动作要求, 选用 3 个液压缸来完成该 8 个顺序动作: 升降缸 1 在工件两个位置( 原位与目标位置) 上方的下降和上升运动, 移动缸 2 的左移和右移运动, 夹紧缸 3 的夹紧和松开动作
缸 1 下降或上升到位时应停止运动, 缸 2 左移或右移到位时也应停止运动,