HM M 的理论基础 一、 HMM 定义 1
N:模型中状态的数目,记t 时刻Markov 链所处的状态为 2
M:每个状态对应的可能的观察数目,记t 时刻观察到的观察值为 3
:初始状态概率矢量,,, 4
A:状态转移概率矩阵,,, 5
B :观察值概率矩阵(适用于离散HMM ),,,;对于连续分布的HMM,记t 时刻的观察值概率为 一个离散型的HMM 模型可以简约的记为
二、关于语音识别的 HMM 的三个基本问题 1
已知观察序列和模型参数,如何有效的计算
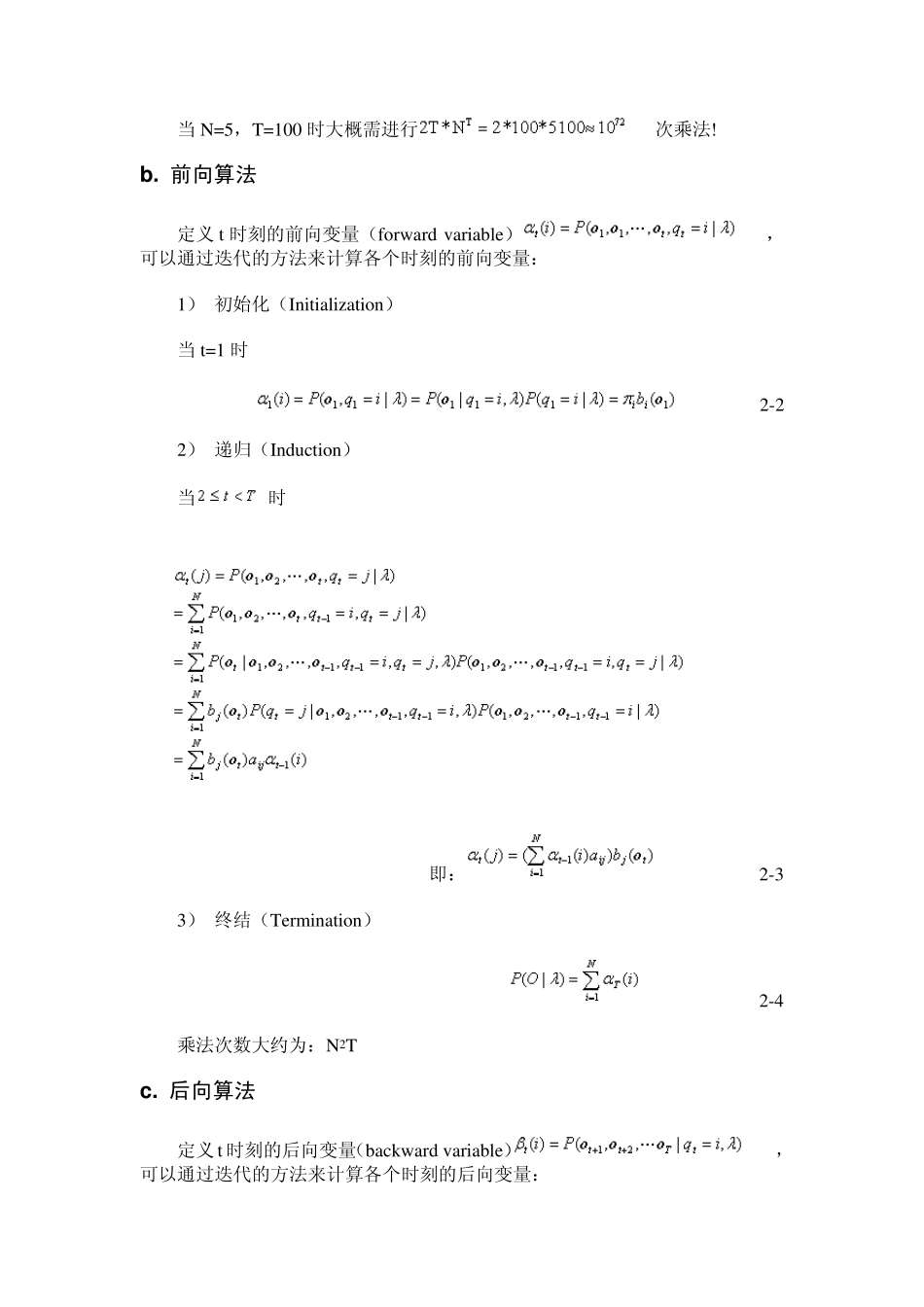
直接计算 2-1 当N=5,T=100 时大概需进行次乘法
前向算法 定义t 时刻的前向变量(forward variable),可以通过迭代的方法来计算各个时刻的前向变量: 1) 初始化(Initialization) 当t=1 时 2-2 2) 递归(Induction) 当时 即: 2-3 3) 终结(Termination) 2-4 乘法次数大约为:N2T c
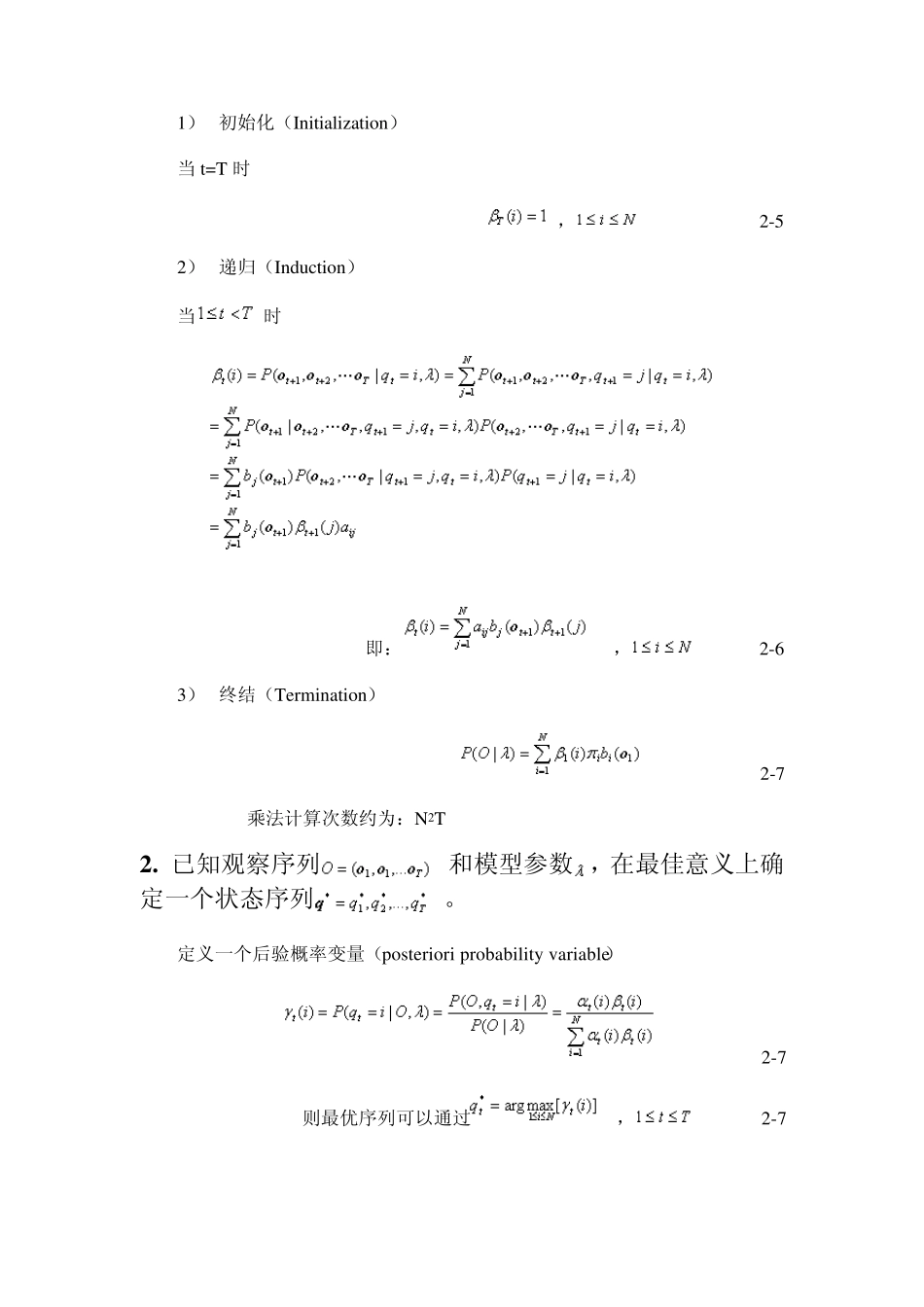
后向算法 定义t 时刻的后向变量(backward variable),可以通过迭代的方法来计算各个时刻的后向变量: 1) 初始化(Initialization) 当t=T 时 , 2-5 2) 递归(Induction) 当 时 即:, 2-6 3) 终结(Termination) 2-7 乘法计算次数约为:N2T 2
已知观察序列和模型参数,在最佳意义上确定一个状态序列
定义一个后验概率变量(posteriori probability variable) 2-7 则最优序列可以通过, 2-7 求得
不过,这样求得的最优序列有些问题
如果,那么这个最优序列本身就不存在
这里讨论的最佳意义上的最优序列,是使最大化时的确定的状态序列
即,使最大化时确定的状态序列
定义为 t 时刻沿一条路径,且,输出观察序列的最大