1 INPHO 软件自动空三加密 启动软件后建立一个新的工程,点击菜单栏的File,弹出窗口 点击New File 弹出对话窗口 点击ok,出现下面的窗口
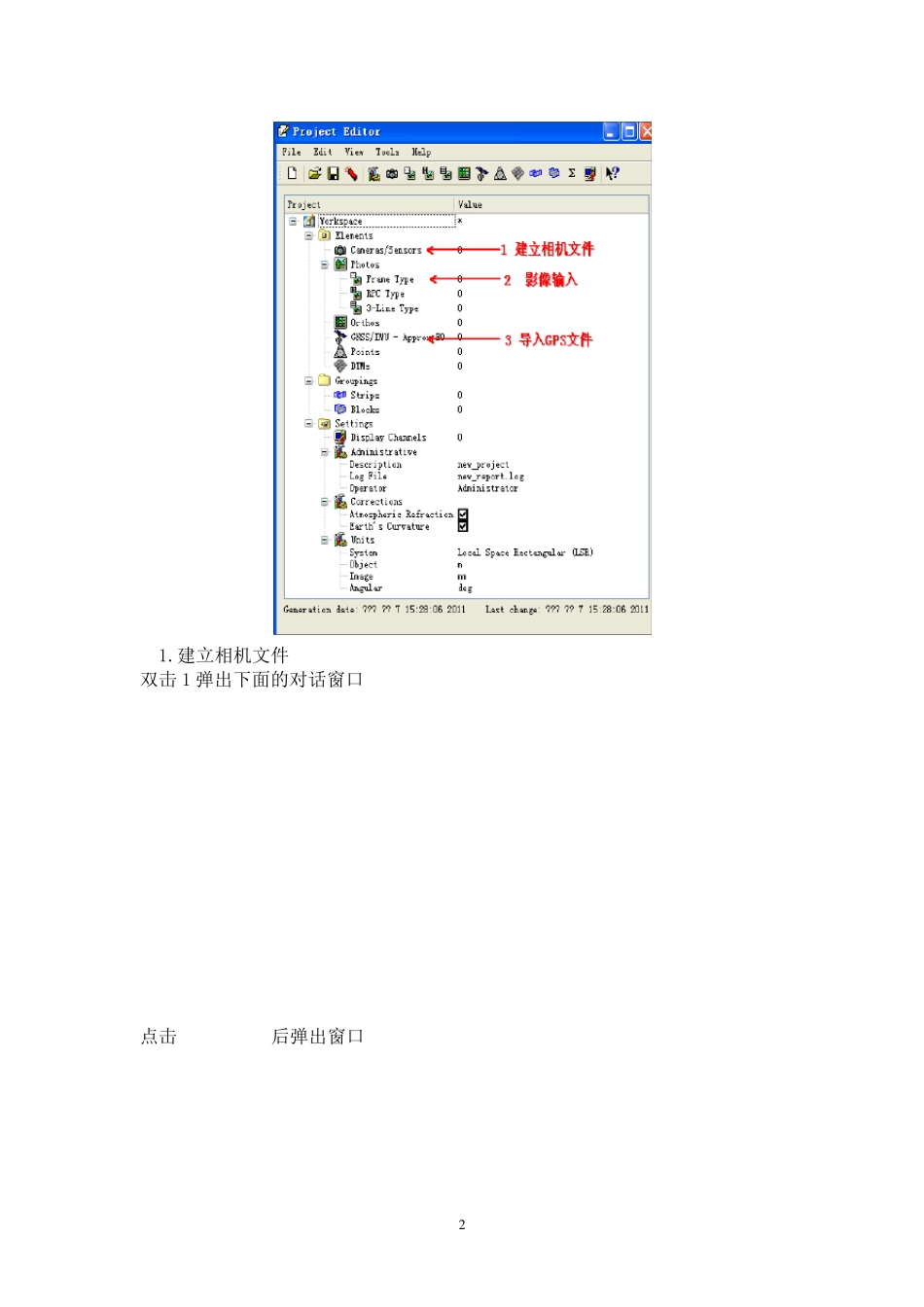
根据相关的设计文件,数据视情况开始相应的操作 2 1
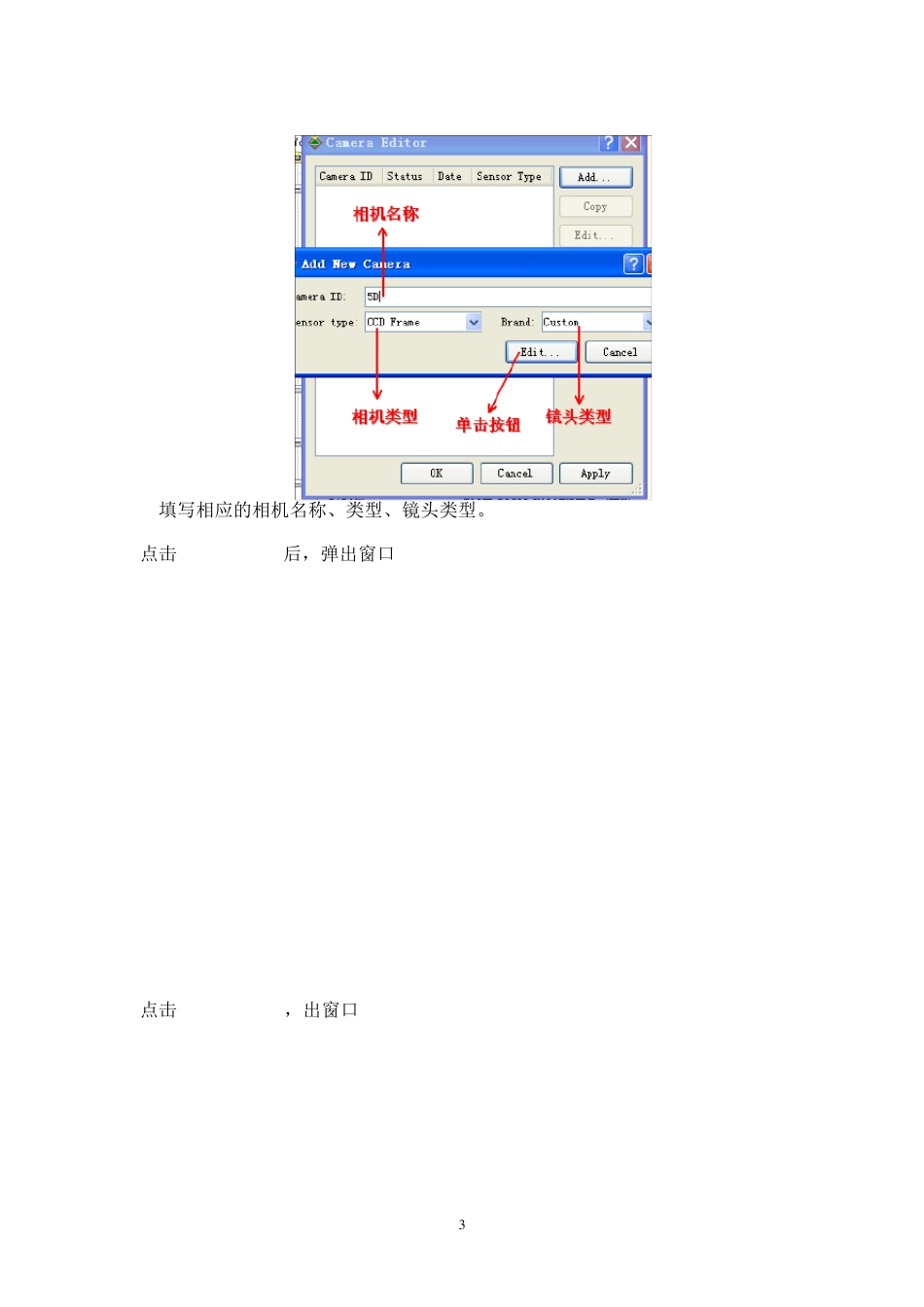
建立相机文件 双击1 弹出下面的对话窗口 点击后弹出窗口 3 填写相应的相机名称、类型、镜头类型
点击后,弹出窗口 点击,出窗口 4 根据相机的检校文件,把相应的值填写到窗口中,由于影像经过畸变差改正所在像主点的坐标值都给定零值,点击 接着点击下图中的 5 到此相机文件就建好了
导入影像数据 回到project editor 界面,双击 Frame Type,弹出对话框
在对话框,选择 Import 的第一个选项,如下图 点击按钮,选中 6 选择影像存放的工程目录文件夹 点击按钮 7 影像导入,在“”处填写飞行区域的地面平均高度值,点击 按钮进行下一步 8 点击按钮,出现下图的操作 点击图中的按钮,点击下图中的按钮 3
影像就导入工程完成了
导入GPS 导航数据 导入航片初始坐标,即根据数据检查软件输出的XYZ坐标为初设概略航片坐标
格式如下: 9 # /航带分隔符 11 x11 y11 z11 /航片号 X坐标 Y坐标 Z坐标 12 x12 y12 z12 # 21 x21 y21 z21 22 x22 y22 z22 # ⋯ ⋯ ⋯ ⋯ # 如果是GPS辅助摄影,按 photoID px py pz omega phi kappa 顺序导入,航带之间用“#”隔开
接着双击下图中红线标注处 双击后弹出下图的窗口 10 点击上图中红色框标处,出现下图的对话窗口 点击上图中红色框标处,出现下图的对话窗口 选择根据数据检查软件输出的 XYZ坐标建立的 GPS 导航数据后,双击图中红色框标注的按钮出现下图的对话窗口 1 1 点击上图中的按钮出现下图的对话