实验二 上水箱液位简单P ID 控制实验 一
实验目的 1
通过实验熟悉单回路反馈控制系统的组成和工作原理
分析分别用P、 PI 和 PID 调节时的过程图形曲线
定性地研究P、 PI 和 PID 调节器的参数对系统性能的影响
实验原理 图 3-1 为单回路上水箱液位控制系统,单回路调节系统一般指在一个调节对象上用一个调节器来保持一个参数的恒定,而调节器只接受一个测量信号,其输出也只控制一个执行机构
本系统所要保持的恒定参数是液位的给定高度,即控制的任务是控制上水箱液位等于给定值所要求的高度
根据控制框图,这是一个闭环反馈单回路液位控制,采用工业智能仪表控制
当调节方案确定之后,接下来就是整定调节器的参数,一个单回路系统设计安装就绪之后,控制质量的好坏与控制器参数选择有着很大的关系
合适的控制参数,可以带来满意的控制效果
反之,控制器参数选择得不合适,则会使控制质量变坏,达不到预期效果
因此,当一个单回路系统组成好以后,如何整定好控制器参数是一个很重要的实际问题
一个控制系统设计好以后,系统的投运和参数整定是十分重要的工作
一般言之,用比例(P)调节器的系统是一个有差系统,比例度δ 的大小不仅会影响到余差的大小,而且也与系统的动态性能密切相关
比例积分( PI) 调节器,由于积分的作用,P ID 控制器 电动调节阀 上小水箱 液位变送器 + ─ 给定 液位 图 3-1、实验原理图 扰动 不仅能实现系统无余差,而且只要参数δ , Ti 调节合理,也能使系统具有良好的动态性能
比例积分微分( PID) 调节器是在PI 调节器的基础上再引入微分D 的作用,从而使系统既无余差存在,又能改善系统的动态性能(快速性、稳定性等)
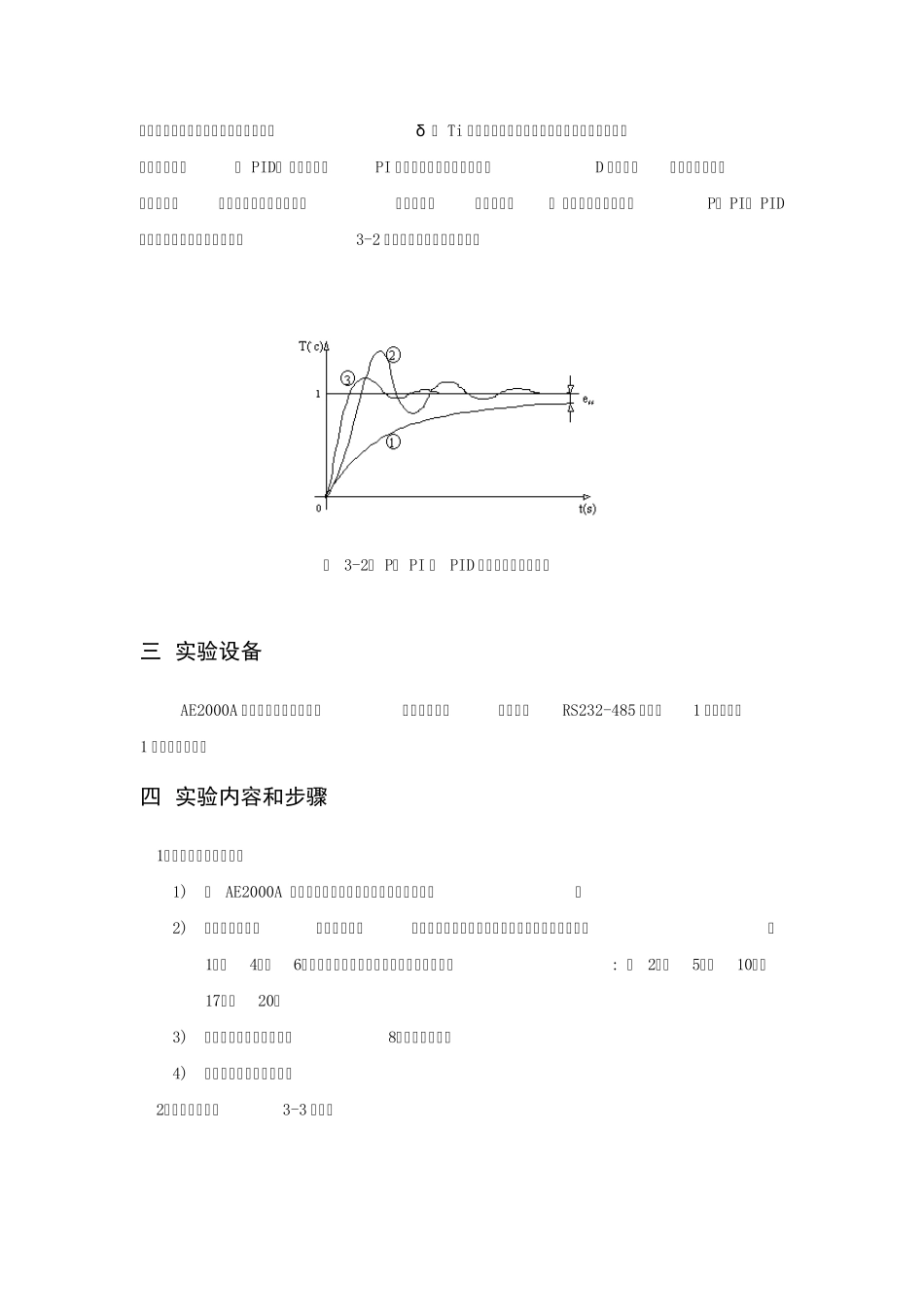
在单位阶跃作用下,P、 PI、 PID调节系统的阶跃响应分别如图3-2 中的曲线①、②、③所示
图 3-2、 P、 PI 和