单片机超声模块说明(HC-SR04) 了解超声模块我们要分几步来理解,包括它的工作原理和在单片机上的运行情况,只有两者相互理解透才能更好的利用超声模块来开发一些东东
不同型号的超声模块其实大致是一样,也就没必要区分型号,除非你是特别要求,对于爱好者,初学者,则是没必要这么苛刻
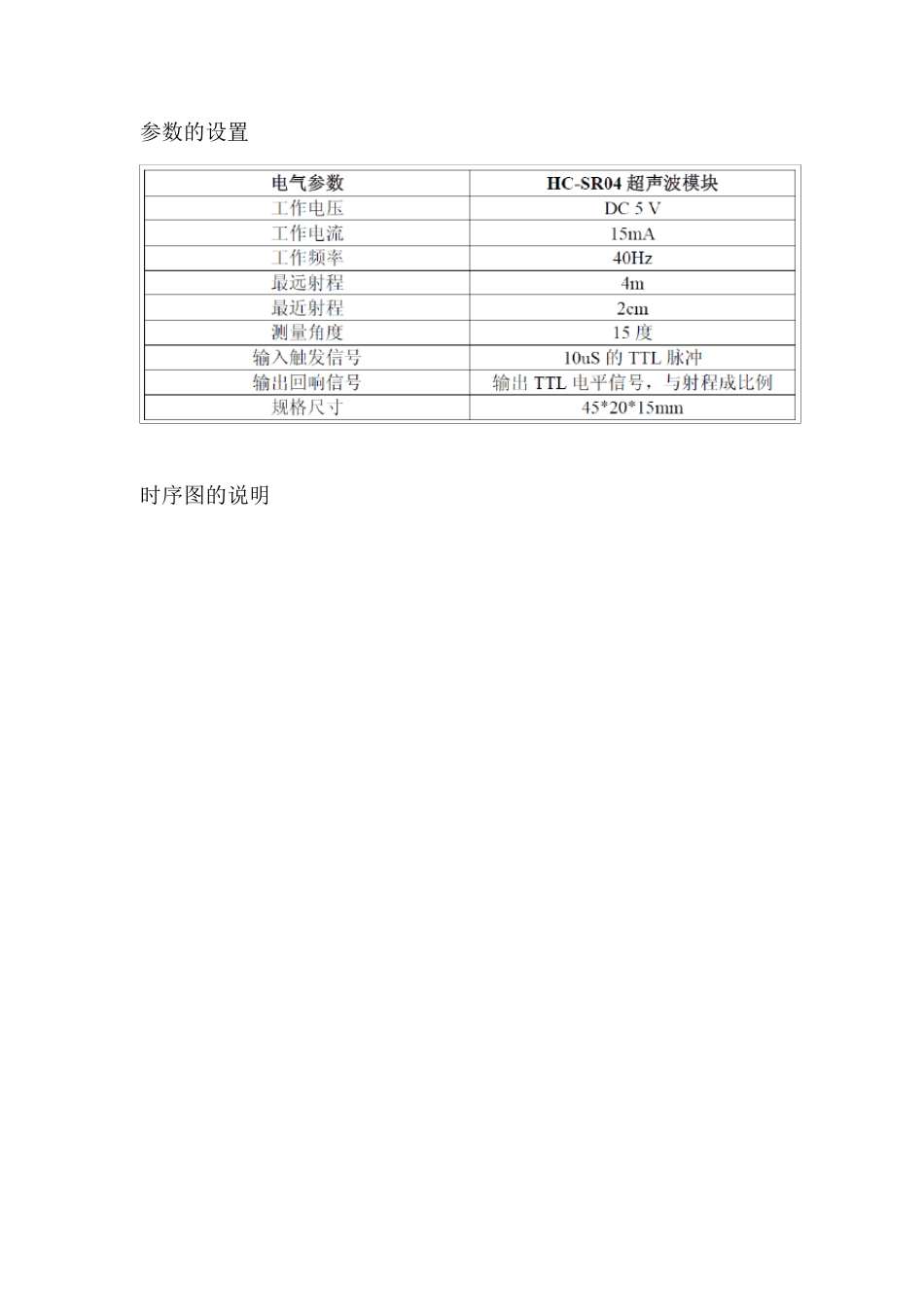
第一步:超声模块的工作原理 参数的设置 时序图的说明 第二步:单片机的连接 上面我们知道怎么连接单片机的线了,对于TRIG 发射端,ECHO接受端,它们只需要四I/O 端口就可以
第三步:程序的编写和功能的开发 这里我选择 TRIG = P2^0 ECHO = P3^2 设置一个报警器,当距离超过 150cm 是就报警,不超过是就不报警
/****************************************** 板子 :郭天祥老师的52 单片机板
设计者 :蒋 时间 :2012-4-29 学校 :南昌航空大学 ******************************************/ #include sbit dula=P2^6; //数码管段选,锁存器控制信号 sbit wela=P2^7; //数码管位选,锁存器控制信号 sbit a=P2^3; #define uchar unsigned char #define uint unsigned int int time; int succeed_flag; uchar timeL; uchar timeH; sbit Trig=P1^0; sbit Echo=P3^2; uchar code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f, 0x6f}; void delay(uint z) { uint x,y; for(x=z;x>0;x--) f