各种 SAR 成像算法总结 1 SAR 成像原理 SAR 成像处理的目的是要得到目标区域散射系数的二维分布,它是一个二维相关处理过程,通常可以分成距离向处理和方位向处理两个部分
在处理过程中,各算法的区别在于如何定义雷达与目标的距离模型以及如何解决距离-方位耦合问题,这些问题直接导致了各种算法在成像质量和运算量方面的差异
一般来说,忽略多普勒频移所引起的距离向相位变化,距离向处理变为一维的移不变过程且相关核已知,即退化为一般的脉冲压缩处理;同时将雷达与目标的距离按 2 阶 Tay lor 展开并忽略高次项,则方位向处理也是一个一维的移不变过程,并退化为一般的脉冲压缩处理,这就是经典的距离多普勒(Range-Doppler RD)算法的实质
若考虑多普勒频移对距离向相位的影响,同时精确的建立雷达与目标的距离模型,则不论距离向处理还是方位向处理都变为二维的移变相关过程
线性调频尺度变换(Chirp-Scaling CS)算法即在此基础之上将二维数据变换到频域,利用Chirp Scaling 原理及频域的相位校正方法,对二维数据进行距离徙动校正处理、距离向及方位向的聚焦处理,最终完成二维成像处理
当方位向数据积累延迟小于全孔径时间(即方位向为子孔径数据)的情况下,方位向处理必须使用去斜(dechirp)处理及频谱分析的方法
在 RD 和 CS 算法的基础之上,采用dechirp 处理及频谱分析的方法完成方位向处理的算法分别称为频谱分析(SPECAN)算法和扩展 CS(Ex tended Chirp Scaling ECS)算法
1 SAR 成像原理 本节以基本的正侧视条带工作模式为例,对SAR 的成像原理进行分析和讨论
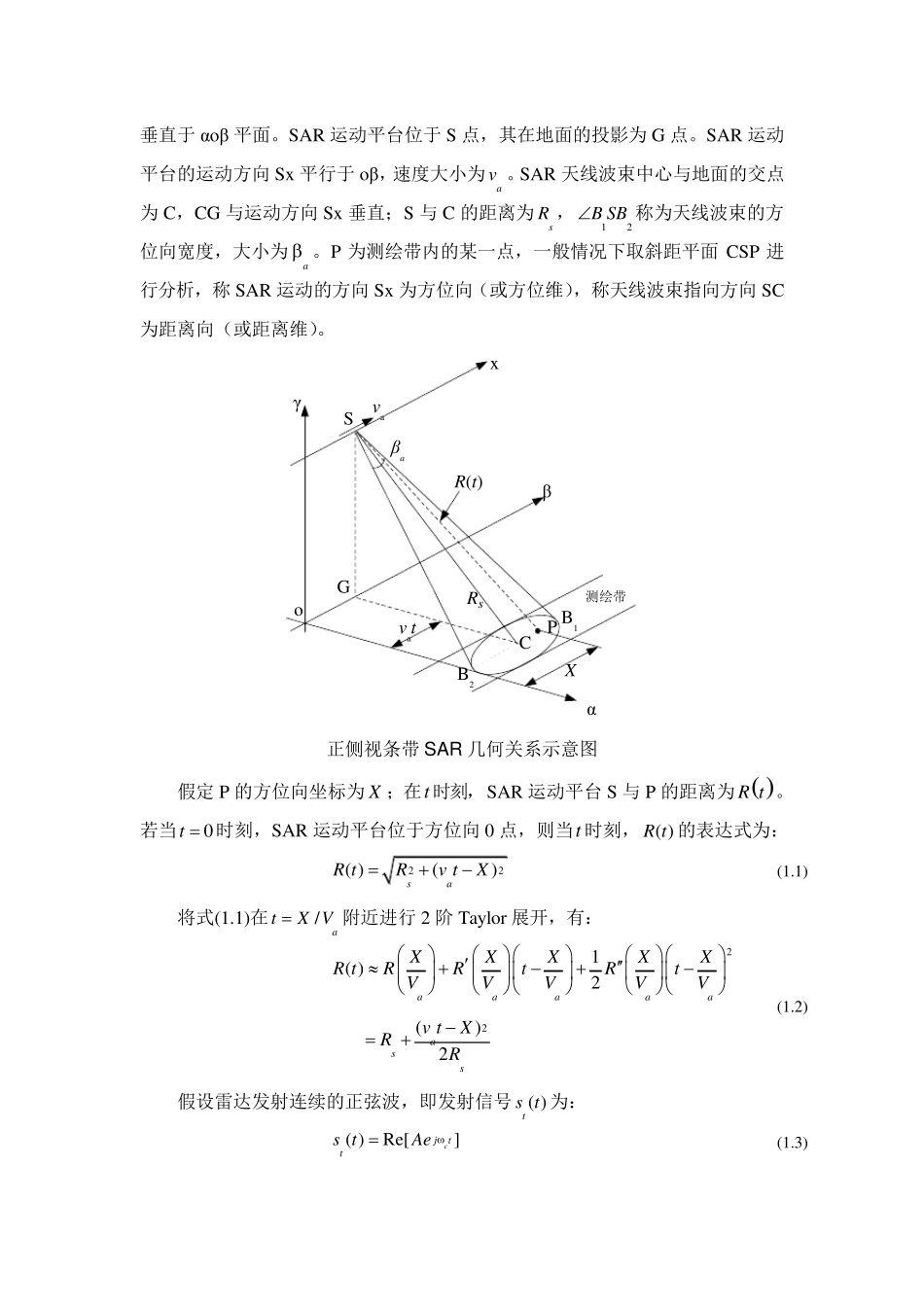
正侧视条带 SAR 的空间几何关系如下图所示
图中,αoβ 平面为地平面,oγ垂直于αoβ 平面
SAR 运动平台位于S 点,其在地面的投影为 G