精品文档---下载后可任意编辑Fuzzy PID Controller2 模糊控制器的设计2
1 模糊控制器的基本原理2
1 模糊控制器的原理模糊控制(Fuzzy Control)是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,它从行为上模仿人的模糊推理和决策过程
模糊控制是先将操作人员或专家经验编成模糊规则,然后将来自传感器的实时信号通过模糊规则模糊化,将模糊化后的信号作为模糊规则的输入,完成模糊推理,进行解模糊化,最后将解模糊后得到的输出量加到执行器上
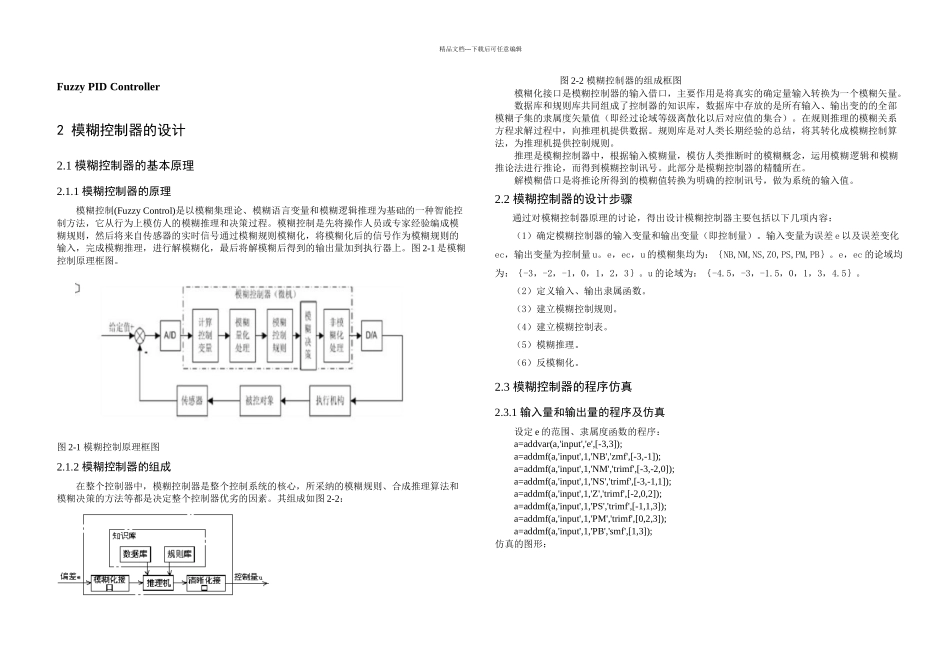
图 2-1 是模糊控制原理框图
图 2-1 模糊控制原理框图2
2 模糊控制器的组成在整个控制器中,模糊控制器是整个控制系统的核心,所采纳的模糊规则、合成推理算法和模糊决策的方法等都是决定整个控制器优劣的因素
其组成如图 2-2: 图 2-2 模糊控制器的组成框图模糊化接口是模糊控制器的输入借口,主要作用是将真实的确定量输入转换为一个模糊矢量
数据库和规则库共同组成了控制器的知识库,数据库中存放的是所有输入、输出变的的全部模糊子集的隶属度矢量值(即经过论域等级离散化以后对应值的集合)
在规则推理的模糊关系方程求解过程中,向推理机提供数据
规则库是对人类长期经验的总结,将其转化成模糊控制算法,为推理机提供控制规则
推理是模糊控制器中,根据输入模糊量,模仿人类推断时的模糊概念,运用模糊逻辑和模糊推论法进行推论,而得到模糊控制讯号
此部分是模糊控制器的精髓所在
解模糊借口是将推论所得到的模糊值转换为明确的控制讯号,做为系统的输入值
2 模糊控制器的设计步骤通过对模糊控制器原理的讨论,得出设计模糊控制器主要包括以下几项内容:(1)确定模糊控制器的输入变量和输出变量(即控制量)
输入变量为误差 e 以及误差变化ec,输出变量为控制量 u
e,ec,u 的模糊集均为:{NB,NM,NS,ZO,PS,P