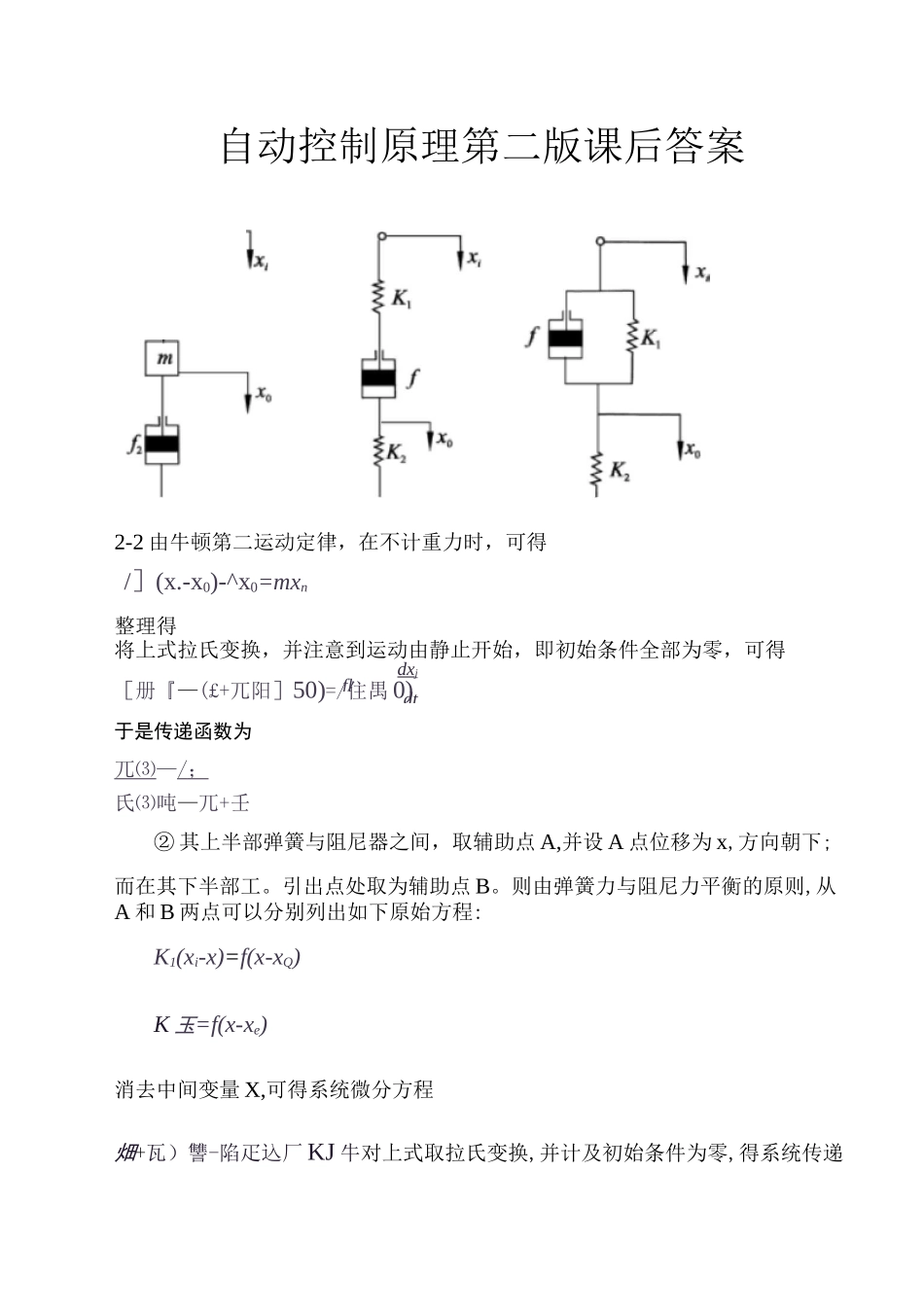
fldxjdt自动控制原理第二版课后答案2-2 由牛顿第二运动定律,在不计重力时,可得/](x
-x0)-^x0=mxn整理得将上式拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得[册『—(£+兀阳]50)=/住禺 0)于是传递函数为兀⑶—/ ; 氏⑶吨—兀+壬② 其上半部弹簧与阻尼器之间,取辅助点 A,并设 A 点位移为 x,方向朝下;而在其下半部工
引出点处取为辅助点 B
则由弹簧力与阻尼力平衡的原则,从A 和 B 两点可以分别列出如下原始方程:K1(xi-x)=f(x-xQ)K 玉=f(x-xe)消去中间变量 X,可得系统微分方程畑+瓦)讐-陷疋込厂 KJ 牛对上式取拉氏变换,并计及初始条件为零,得系统传递函数为兀⑶—畑兀⑶—JX&+K4+KYK2③ 以引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:0(X—对+/(X
-x0)=K2XQ移项整理得系统微分方程对上式进行拉氏变换,并注意到运动由静止开始,即则系统传递函数为乙⑶一介+(陷-瓦)2-3趣需 Ku
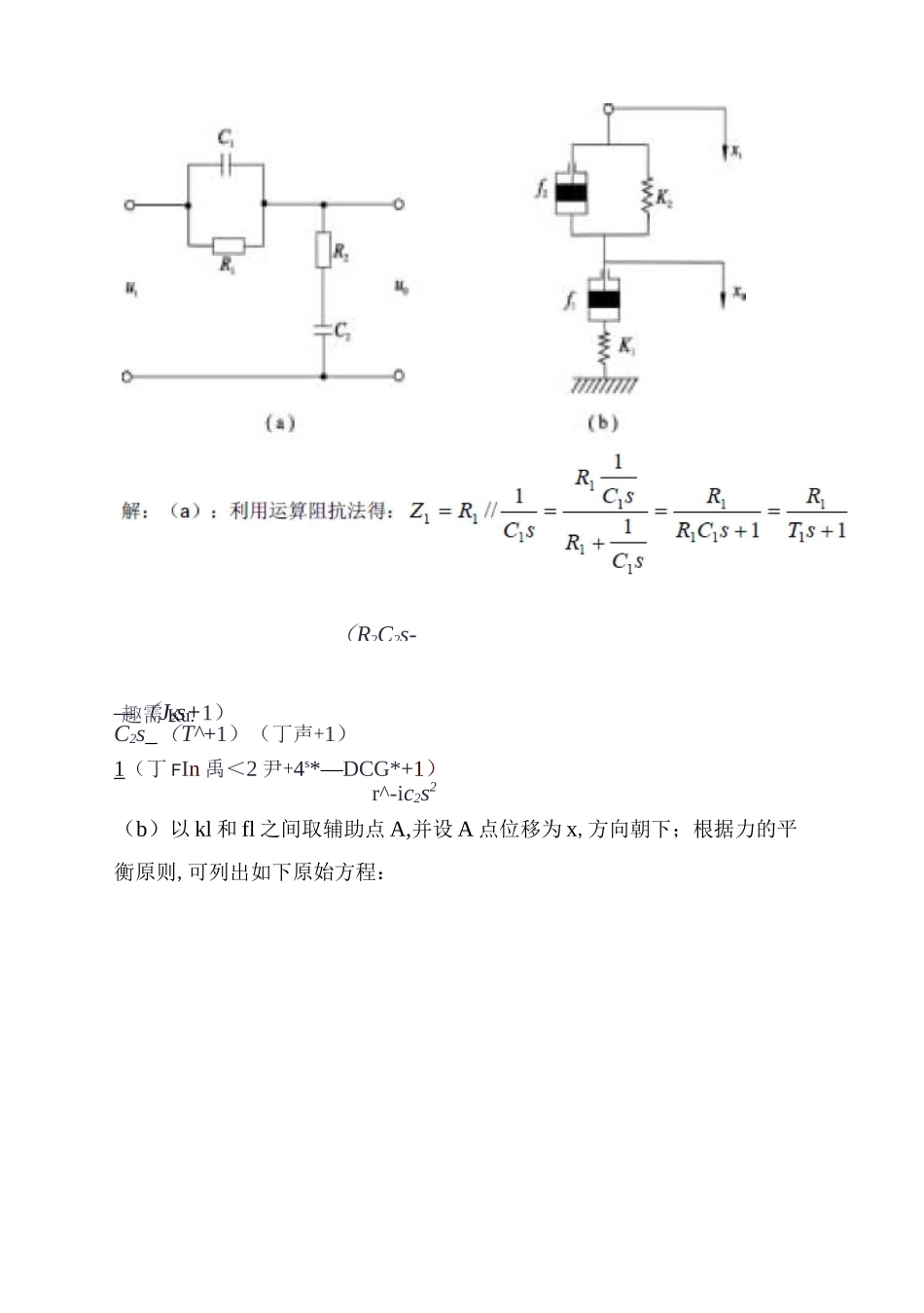
—(J2s+1)C2s_(T^+1)(丁声+1)1(丁 FIn 禹<2 尹+4s*—DCG*+1)r^-ic2s2(b)以 kl 和 fl 之间取辅助点 A,并设 A 点位移为 x,方向朝下;根据力的平衡原则,可列出如下原始方程:(R2C2s-^2(x
-x0)+/2(x
-Xo)=/](x0-x)⑴Kxx=f^-x)(2)所 yr3(x,-xQ)-f2(xi-x0)=K1x