智能无人驾驶汽车计算机控制系统一、智能无人驾驶汽车计算机控制系统简介1、智能无人驾驶简介智能无人驾驶汽车是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,对车辆的操作实质上可视为对一个多输入、多输出、输入输出关系复杂多变、不确定多干扰源的复杂非线性系统的控制过程
驾驶员既要接受环境如通路、拥挤、方向、行人等的信息,还要感受汽车如车速、侧性偏移、横摆角速度等的信息,然后经过判断分析和决策,并与自己的驾驶经验相比较,确定出应该做的操纵动作,最后由身体、手、脚等来完成操纵车辆的动作
因此在整个驾驶过程中,驾驶员的人为因素占了很大的比重
一旦出现驾驶员长时间驾车、疲劳驾车、判断失误的情况,很容易造成交通事故
二、系统的控制要求(1)系统中心控制部件(单片机)可靠性高,抗干扰能力强,工作频率最高可达到25MHz,能保障系统的实时性
(2)系统在软硬件方面均应采用抗干扰技术,包括光电隔离技术、电磁兼容性分析、数字滤波技术等
(3)系统具有电源实时监控、欠压状态自动断电功能
(4)系统具有故障自诊断功能
(5)系统具有良好的人性化显示模块,可以将系统当前状态的重要参数(如智能车速度、电源电压)显示在 LCD 上
(6)系统中汽车驱动力为 500N 时,汽车将在 5 秒内达到 1Om/s 的最大速度
一、系统总体方案设计1、系统总体结构整个系统主要由车模、模型车控制系统及辅助开发系统构成
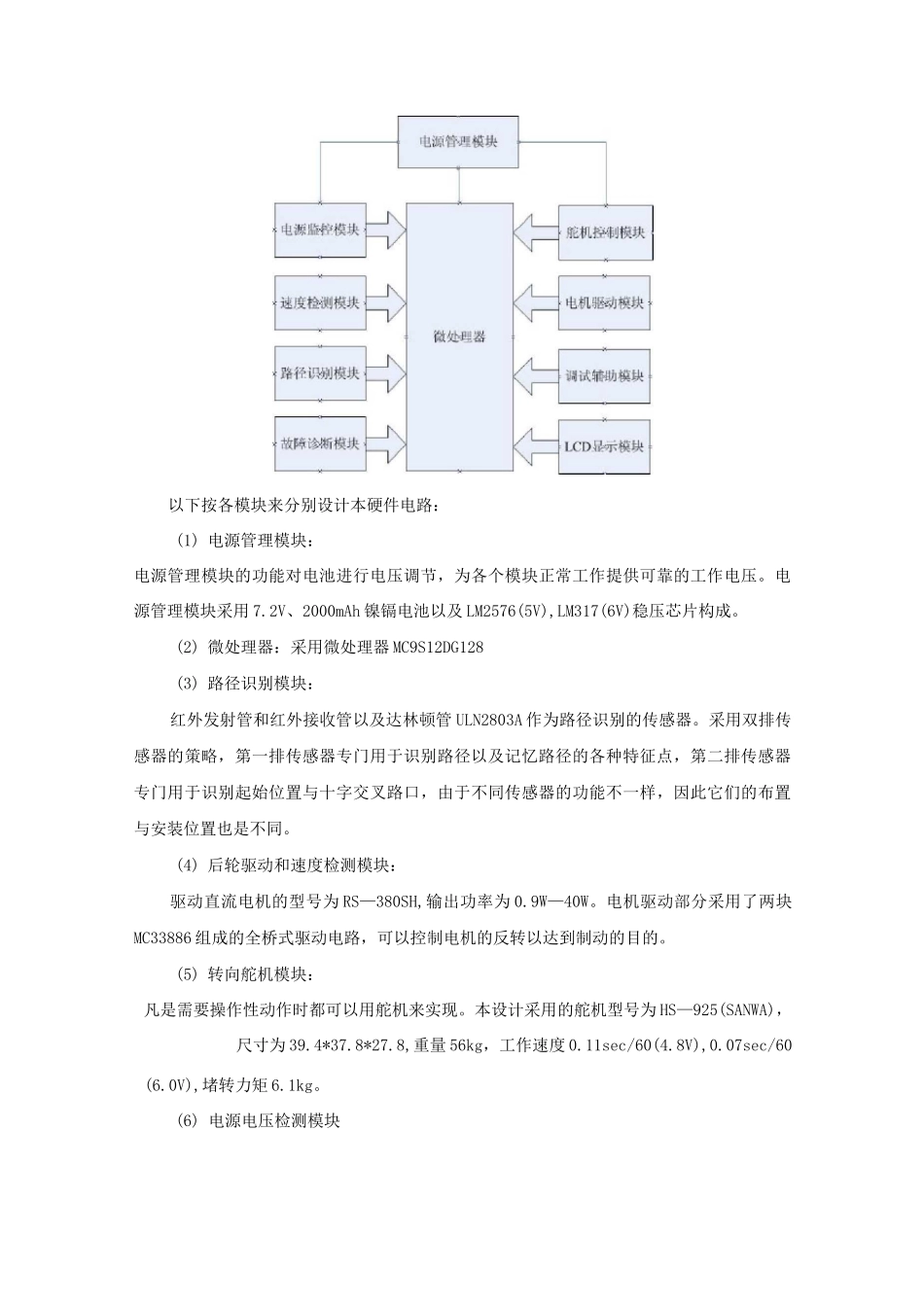
智能车系统的功能模块主要包括:控制核心模块、电源管理模块、路径识别模块、后轮电机驱动模块、转向舵机控制模块、速度检测模块、电池监控模块、小车故障诊断模块、LCD 数据显示模块及调试辅助模块
每个模块都包括硬件和软件两部分
硬件为系统工作提供硬件实体,软件为系统提供各种算法
2、控制机构与执行机构智能车主要通过自制小车来模拟执行机构,自制小车长为 34
6cm,宽为 24
5cm,重为1