中 南 大 学 工 业机器人导论 实 验 报 告 机电工程 学院 机械 专业 班 同组人 姓 名 学号 指导老师 实验日期 2013 年 10 月 22 日 成 绩 实 验 名 称 机器人运动学实验 一、实验目的 1.了解四自由度机械臂的开链结构; 2.掌握机械臂运动关节之间的坐标变换原理; 3.学会机器人运动方程的正反解方法
二、实验原理简述 本实验以 SCARA 四自由度机械臂为例研究机器人的运动学问题
机器人运动学问题包括运动学方程的表示,运动学方程的正解、反解等,这些是研究机器人动力学和机器人控制的重要基础,也是开放式机器人系统轨迹规划的重要基础
机械臂杆件链的最末端是机器人工作的末端执行器(或者机械手),末端执行器的位姿是机器人运动学研究的目标,对于位姿的描述常有两种方法:关节坐标空间法和直角坐标空间法
本次实验用 D-H 变化方法求解运动学问题
建立坐标系如下图所示 连杆坐标系{i }相对于{ i − 1 }的变换矩阵 可以按照下式计算出,其中连杆坐标系D-H 参数为由表1-1 给出
齐坐标变换矩阵为: 其中 描述连杆i 本身的特征;和描述连杆 i− 1 与 i 之间的联系
对于旋转关节,仅是关节变量,其它三个参数固定不变;对于移动关节,仅是关节变量,其它三个参数不变
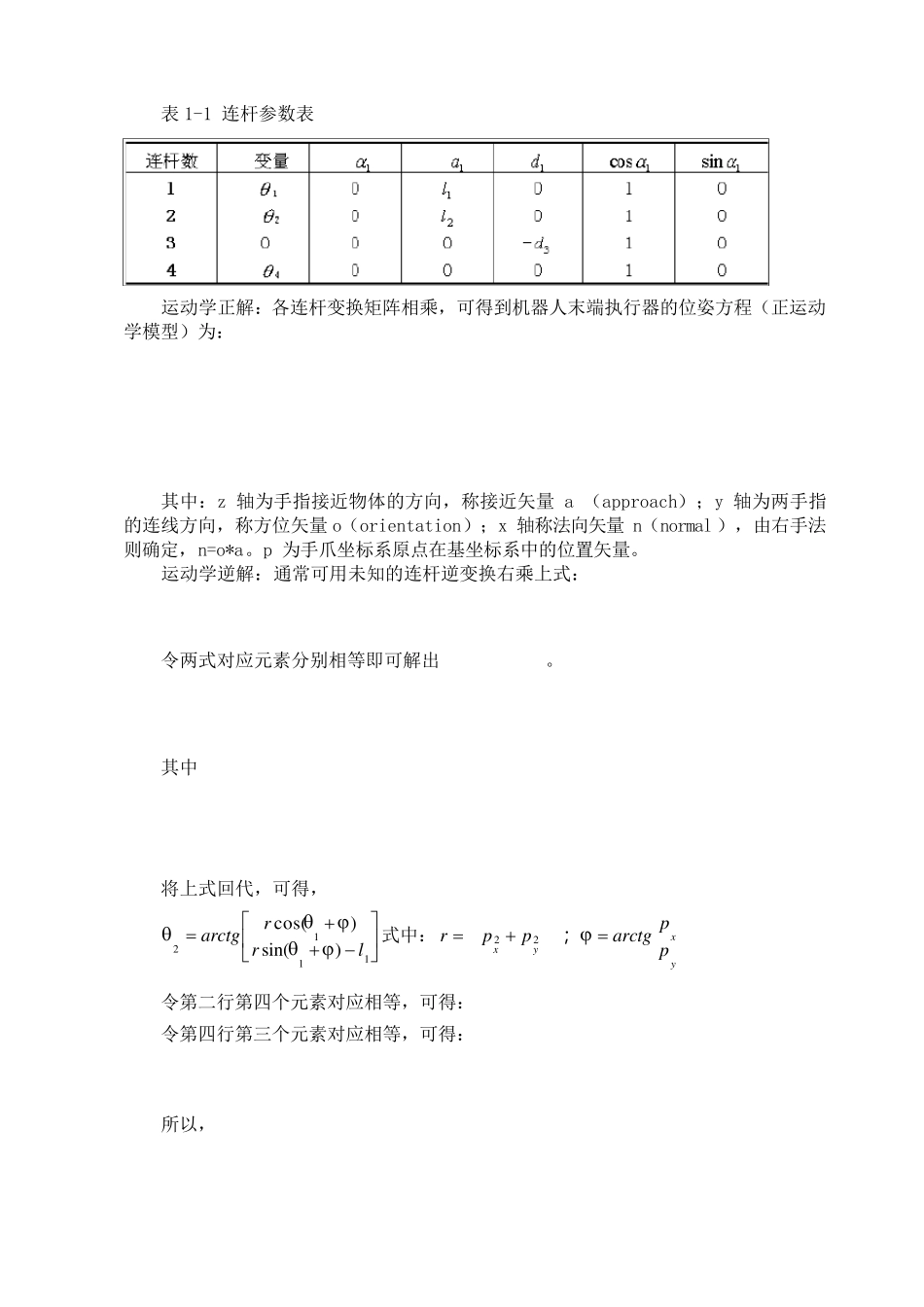
其中连杆长 l1=200mm,l2=200mm,机器人基坐标系为O-X0Y0Z0
根据上面的坐标变换公式,各个关节的位姿矩阵如下: 表1-1 连杆参数表 运动学正解:各连杆变换矩阵相乘,可得到机器人末端执行器的位姿方程(正运动学模型)为: 其中:z 轴为手指接近物体的方向,称接近矢量a (approach);y 轴为两手指的连线方向,称方位矢量o(orientation);x 轴称法向矢量n(normal ),由右手法则确定,n=o*a
p 为手爪坐标系原点在基坐标系中的位置矢量