① 场景坐标:OXYZ 绝对坐标或世界坐标 通常情况下x′o′y′为 oxyz 的一部分,即 x′o′y′与 xoy 重合
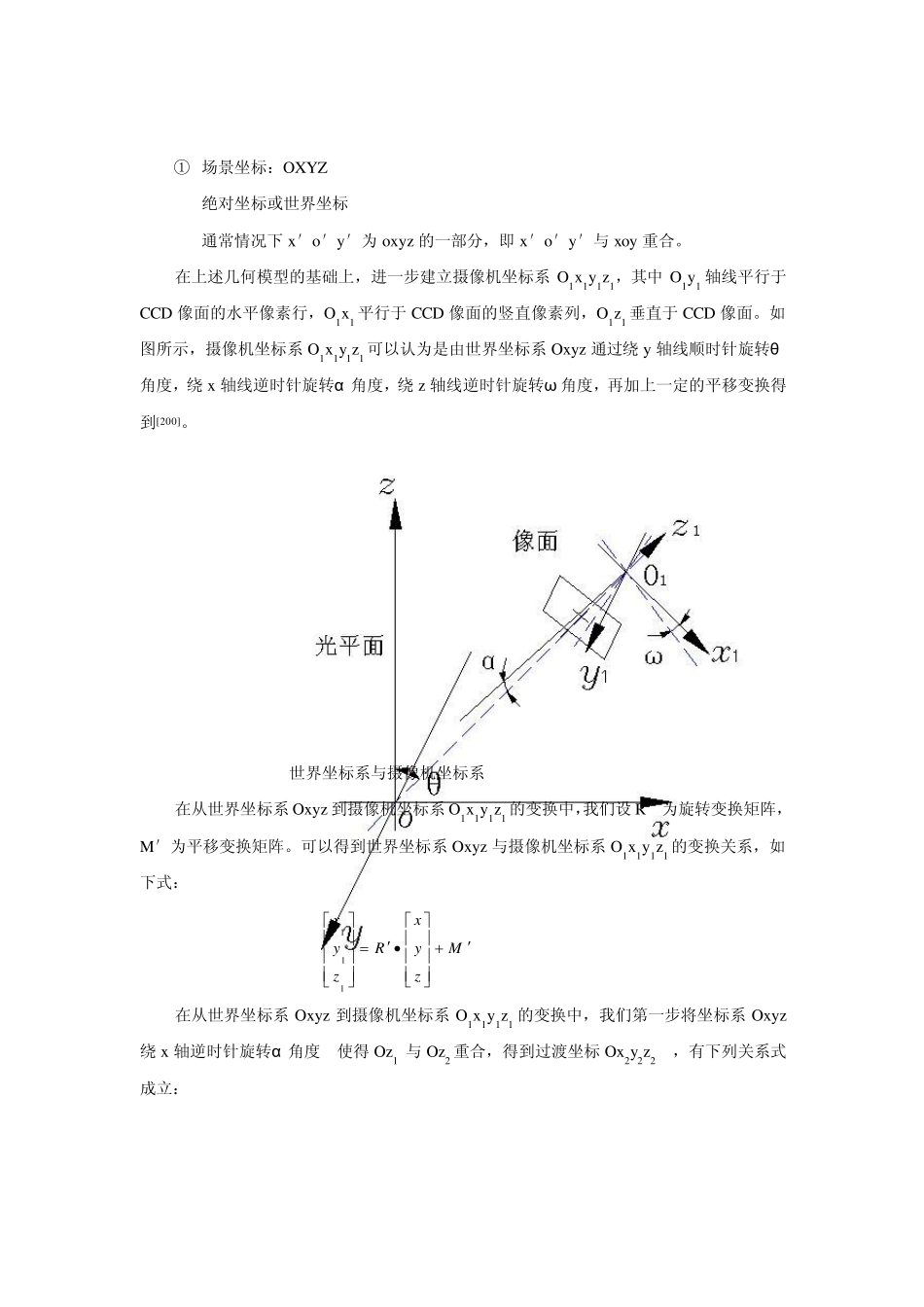
在上述几何模型的基础上,进一步建立摄像机坐标系 O1x1y1z1,其中 O1y1 轴线平行于CCD 像面的水平像素行,O1x1 平行于 CCD 像面的竖直像素列,O1z1 垂直于 CCD 像面
如图所示,摄像机坐标系 O1x1y1z1 可以认为是由世界坐标系 Oxyz 通过绕 y 轴线顺时针旋转θ角度,绕 x 轴线逆时针旋转α 角度,绕 z 轴线逆时针旋转ω 角度,再加上一定的平移变换得到[200]
世界坐标系与摄像机坐标系 在从世界坐标系 Oxyz到摄像机坐标系 O1x1y1z1 的变换中,我们设 R′为旋转变换矩阵,M′为平移变换矩阵
可以得到世界坐标系 Oxyz 与摄像机坐标系 O1x1y1z1 的变换关系,如下式: MzyxRzyx111 在从世界坐标系 Oxyz 到摄像机坐标系 O1x1y1z1 的变换中,我们第一步将坐标系 Oxyz绕 x 轴逆时针旋转α 角度, 使得 Oz1 与 Oz2 重合,得到过渡坐标Ox2y2z2 ,有下列关系式成立: 2 zyxzyxcossin0sincos0001222 再将坐标系Ox2y2z2 绕y 轴顺时针旋转θ 角度, 使得Ox1 与Ox3 重合,得到过渡坐标Ox3y3z3 ,有下列关系式成立: 222333cos0sin010sin0coszyxzyx 最后,将坐标系Ox3y3z3 绕z 轴逆时针旋转ω 角度, 使得Oy1 与Oy4 重合,得到过渡坐标Ox4y4z4 ,有下列关系式成立: