考试成绩 任课教师 陕西科技大学研究生考试试卷 考试科目 机电系统建模与仿真 专 业 机械制造及其自动化 年 级 机电研1 2 考生姓名 贾延旭 考生类别 日校生 注 意 事 项 1. 试题随试卷交回; 2. 试卷评阅后,一周内送交研究生秘书处保存 3. 必修课以百分制计算成绩,考查课以五级计分(优、良、中、及格、不及格)计算成绩
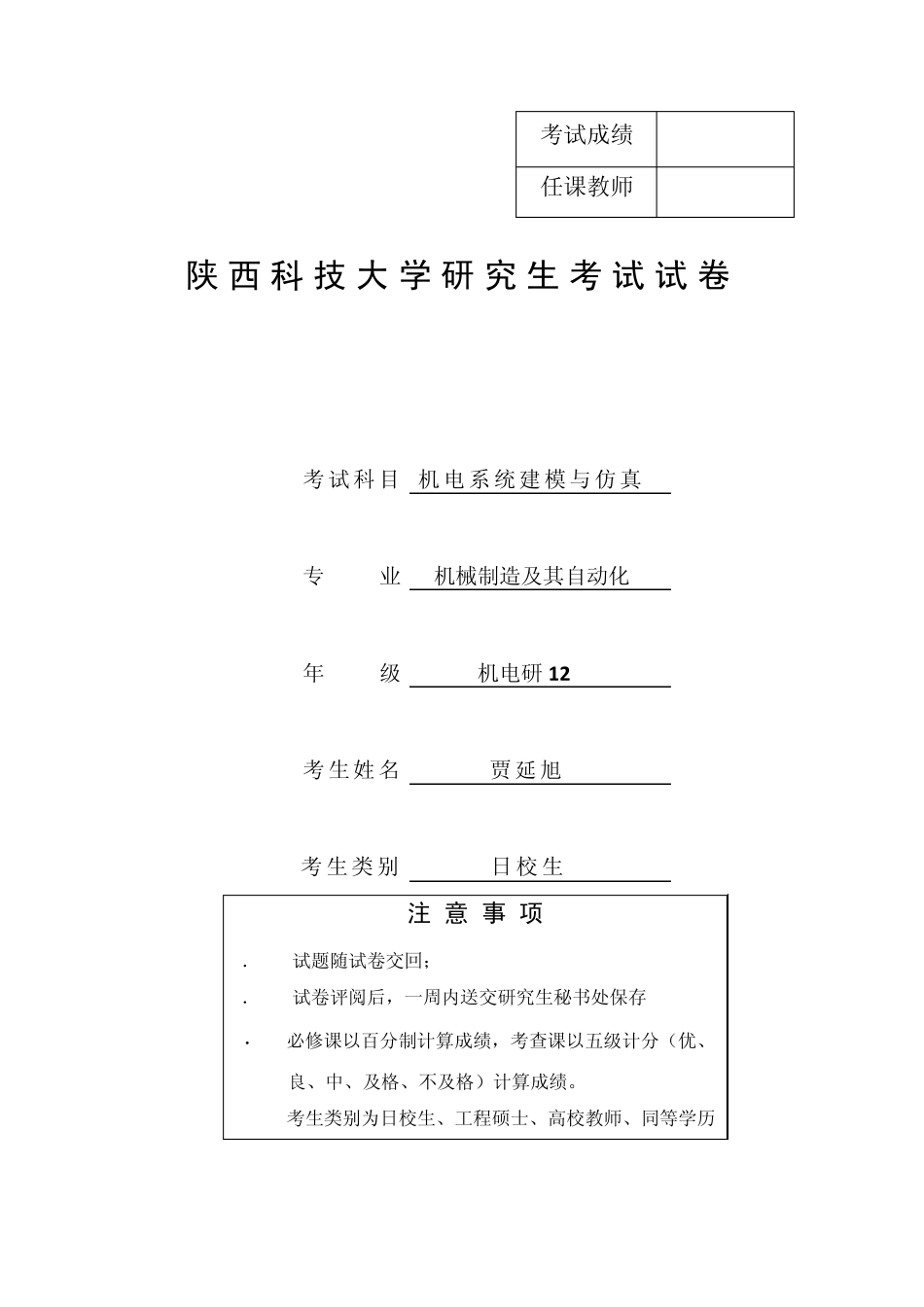
考生类别为日校生、工程硕士、高校教师、同等学历 Simmechanices: 平面四连杆机构仿真,主动杆3 长度为0
12m,连杆2 长度为1m,杆3 长度为0
6m,杆2固定,铰接位置长度为0
主动杆3与水平轴X的夹角为60°,杆2的水平夹角为29
从该机构运动简图可见,整个系统有两个固定机架,3 个刚体的连杆通过四个单自由度转动副和这两个固定机架相连,假设主动杆3 绕铰4 以 w 角速度转动,并假设为正弦信号,试分析杆2 的两个端点 3 和 2 的运动轨迹
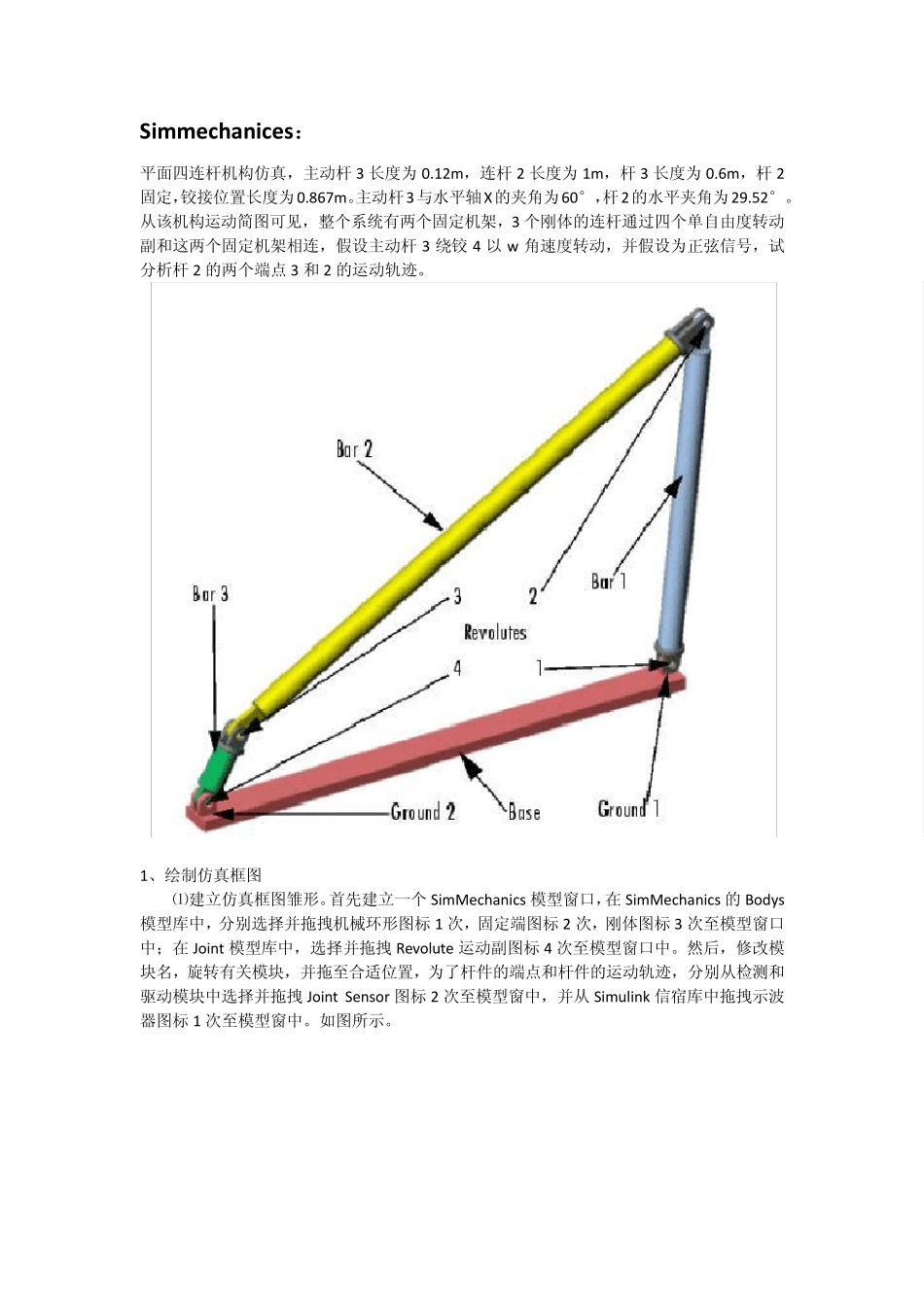
1、绘制仿真框图 ⑴建立仿真框图雏形
首先建立一个 SimMechanics 模型窗口,在 SimMechanics 的Bodys模型库中,分别选择并拖拽机械环形图标 1 次,固定端图标 2 次,刚体图标 3 次至模型窗口中;在 Joint 模型库中,选择并拖拽 Revolute 运动副图标 4 次至模型窗口中
然后,修改模块名,旋转有关模块,并拖至合适位置,为了杆件的端点和杆件的运动轨迹,分别从检测和驱动模块中选择并拖拽 Joint Sensor 图标 2 次至模型窗中,并从 Simulink 信宿库中拖拽示波器图标 1 次至模型窗中
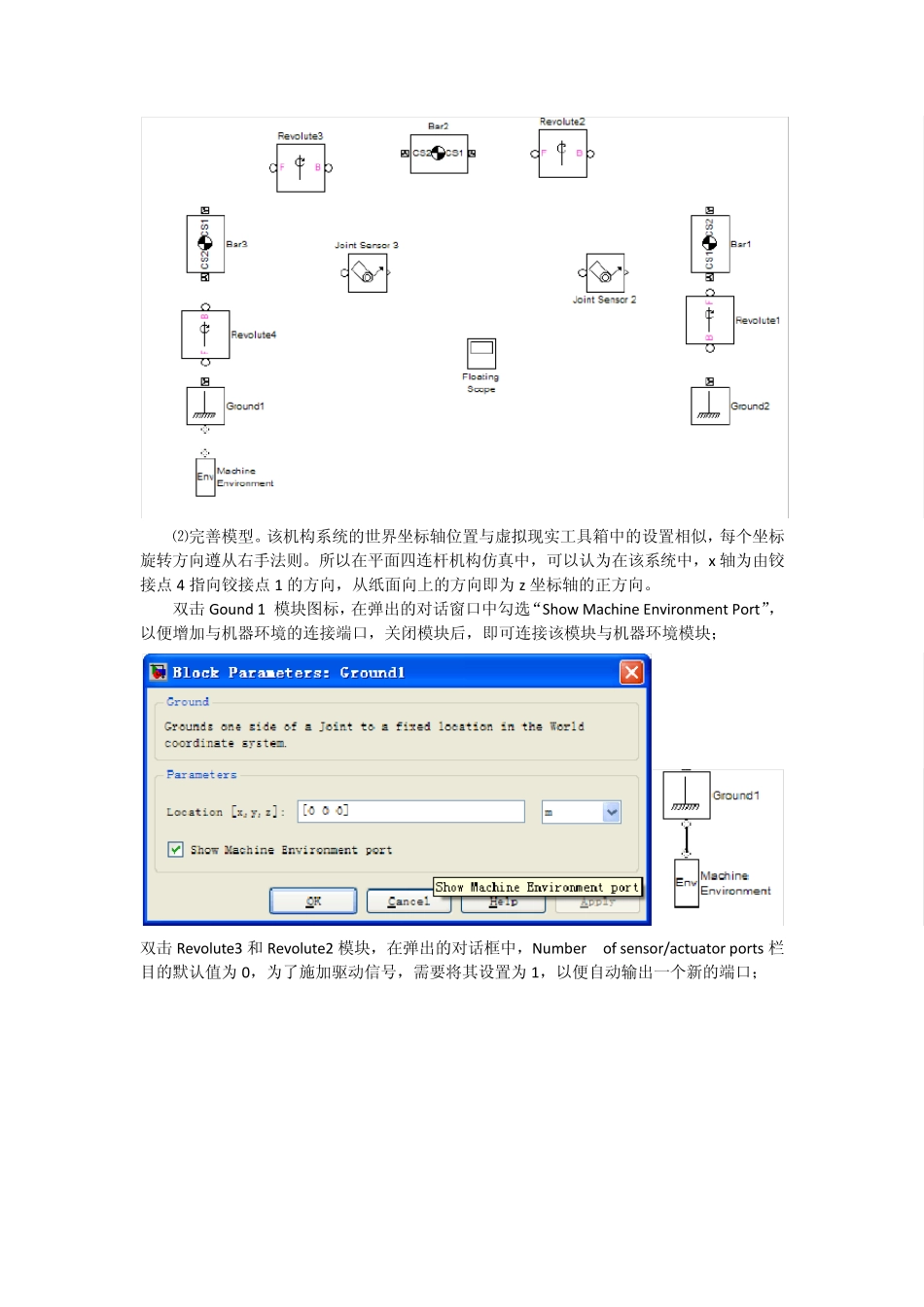
该机构系统的世界坐标轴位置与虚拟现实工具箱中的设置相似,每个坐标旋转方向遵从右手法则
所以在平面四连杆机构仿真中,可以认为在该系统中,x 轴为由铰接点4 指向铰接点1 的方向,从纸面向上的方向即为z 坐标