步进电机原理 按照常理来说,步进电机接线要根据线的颜色来区分接线
但是不同公司生产的步进电机,线的颜色不一样
特别是国外的步进电机
那么,步进电机接线应该用万用表打表
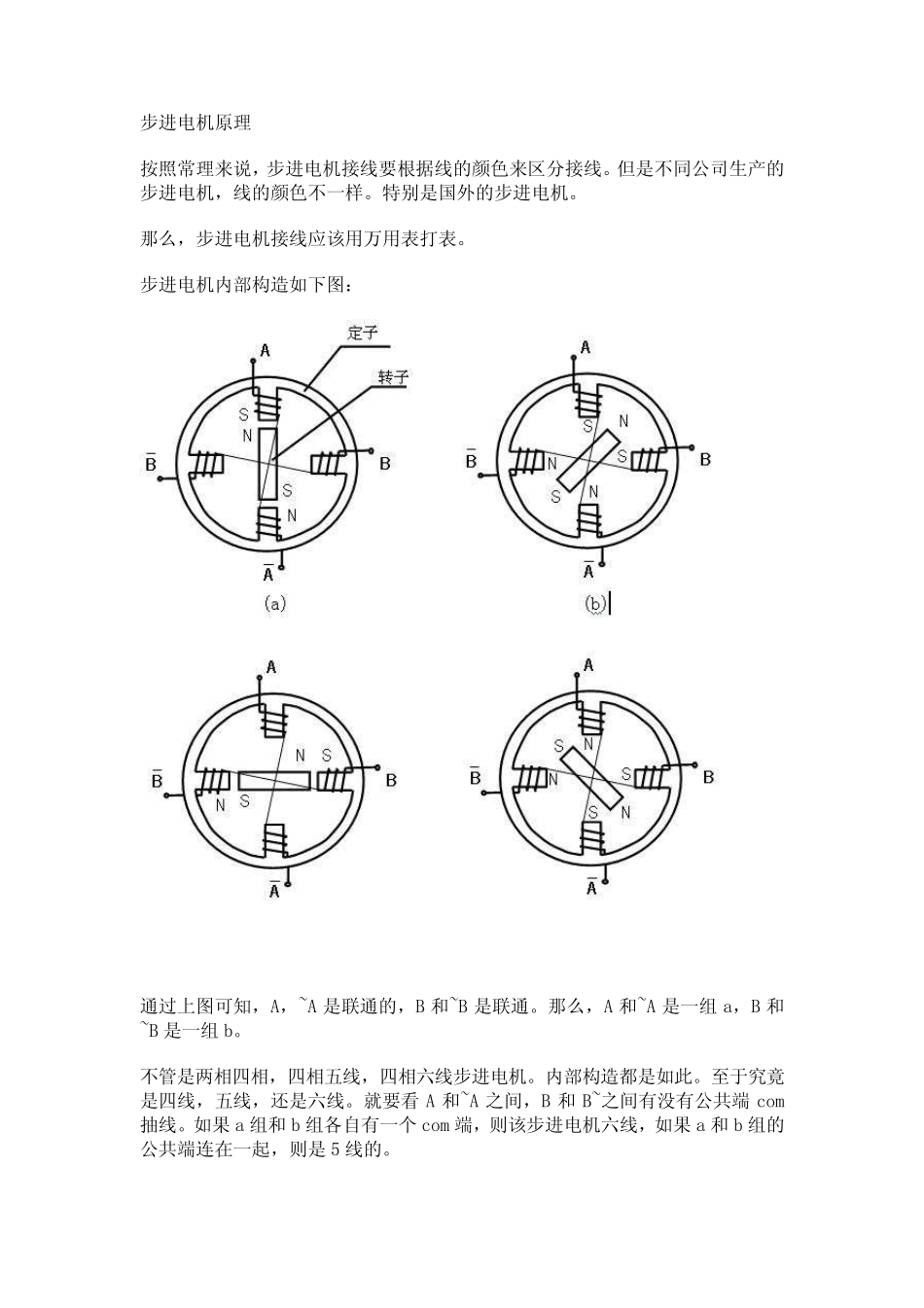
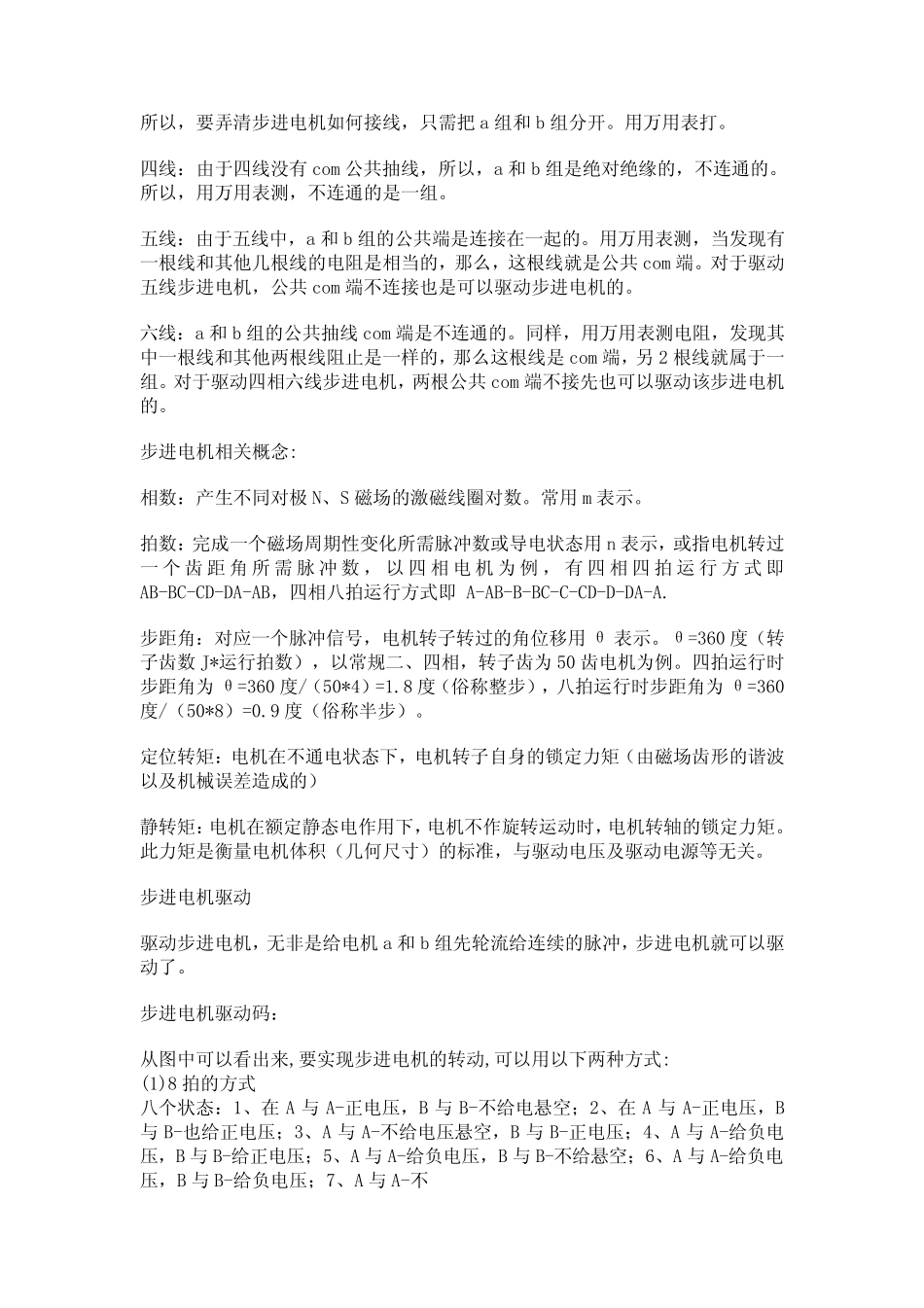
步进电机内部构造如下图: 通过上图可知,A,~A 是联通的,B 和~B 是联通
那么,A 和~A 是一组 a,B 和~B 是一组 b
不管是两相四相,四相五线,四相六线步进电机
内部构造都是如此
至于究竟是四线,五线,还是六线
就要看 A 和~A 之间,B 和 B~之间有没有公共端 com抽线
如果 a 组和 b 组各自有一个 com 端,则该步进电机六线,如果 a 和 b 组的公共端连在一起,则是 5 线的
所以,要弄清步进电机如何接线,只需把a 组和b 组分开
四线:由于四线没有com 公共抽线,所以,a 和b 组是绝对绝缘的,不连通的
所以,用万用表测,不连通的是一组
五线:由于五线中,a 和b 组的公共端是连接在一起的
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com 端
对于驱动五线步进电机,公共com 端不连接也是可以驱动步进电机的
六线:a 和b 组的公共抽线com 端是不连通的
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com 端,另2 根线就属于一组
对于驱动四相六线步进电机,两根公共com 端不接先也可以驱动该步进电机的
步进电机相关概念: 相数:产生不同对极N、S 磁场的激磁线圈对数
常用m 表示
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n 表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A
步距角:对应一个脉冲信号,电机转子转过的角位移用θ 表示
θ=360 度(转