《电力拖动自动控制系统》课程设计指导书 直流电机双闭环调速控制系统设计 封皮(统一) 目录格式: 目录 1 设计任务 1
1 技术数据………………………………………………………………
2 要求完成的任务………………………………………………………
2 2 直流电机双闭环系统的组成…………………………………………………
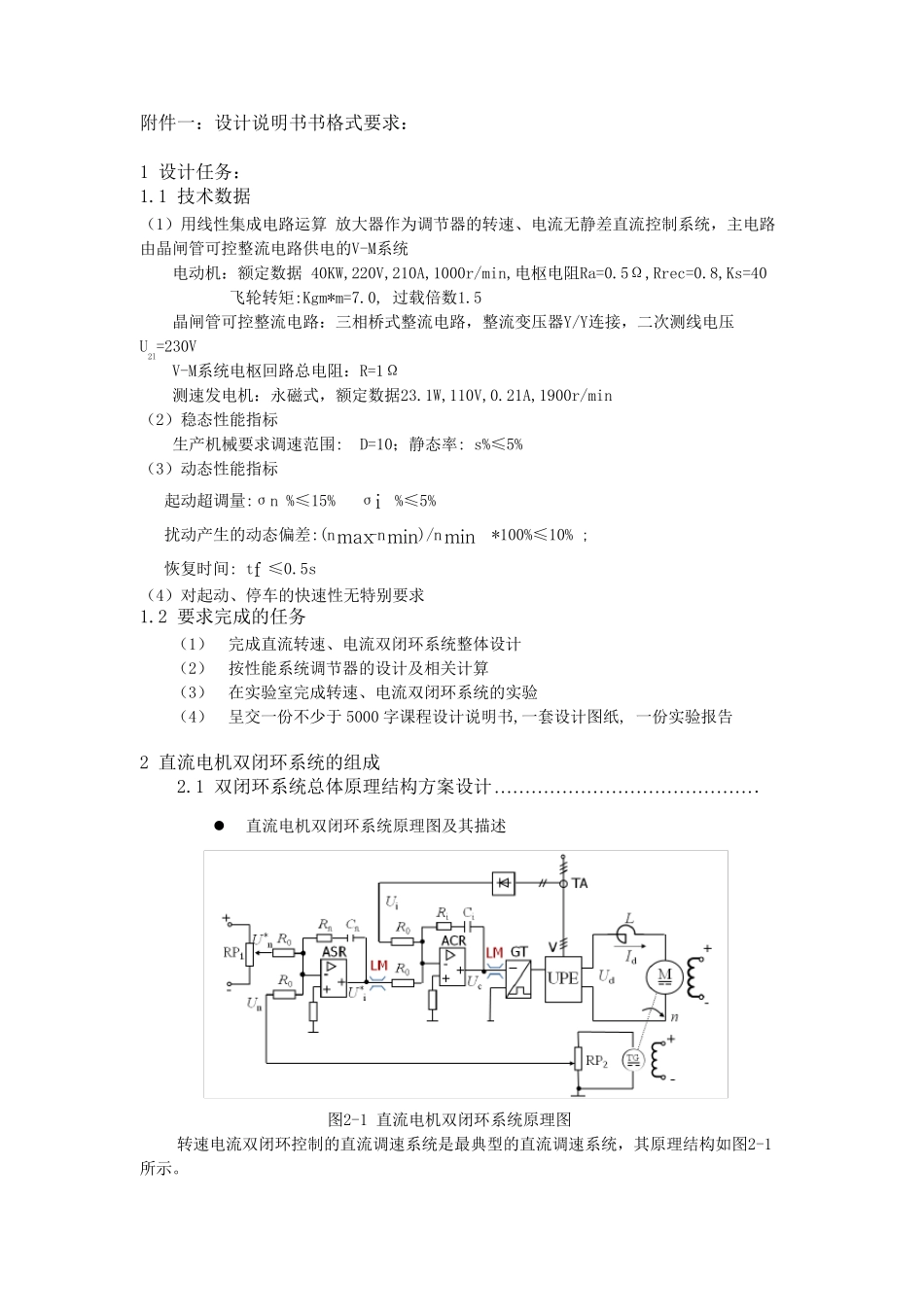
1 双闭环系统总体原理结构方案设计……………………………………
2 双闭环系统各组成部分电路方案设计………………………………… 2
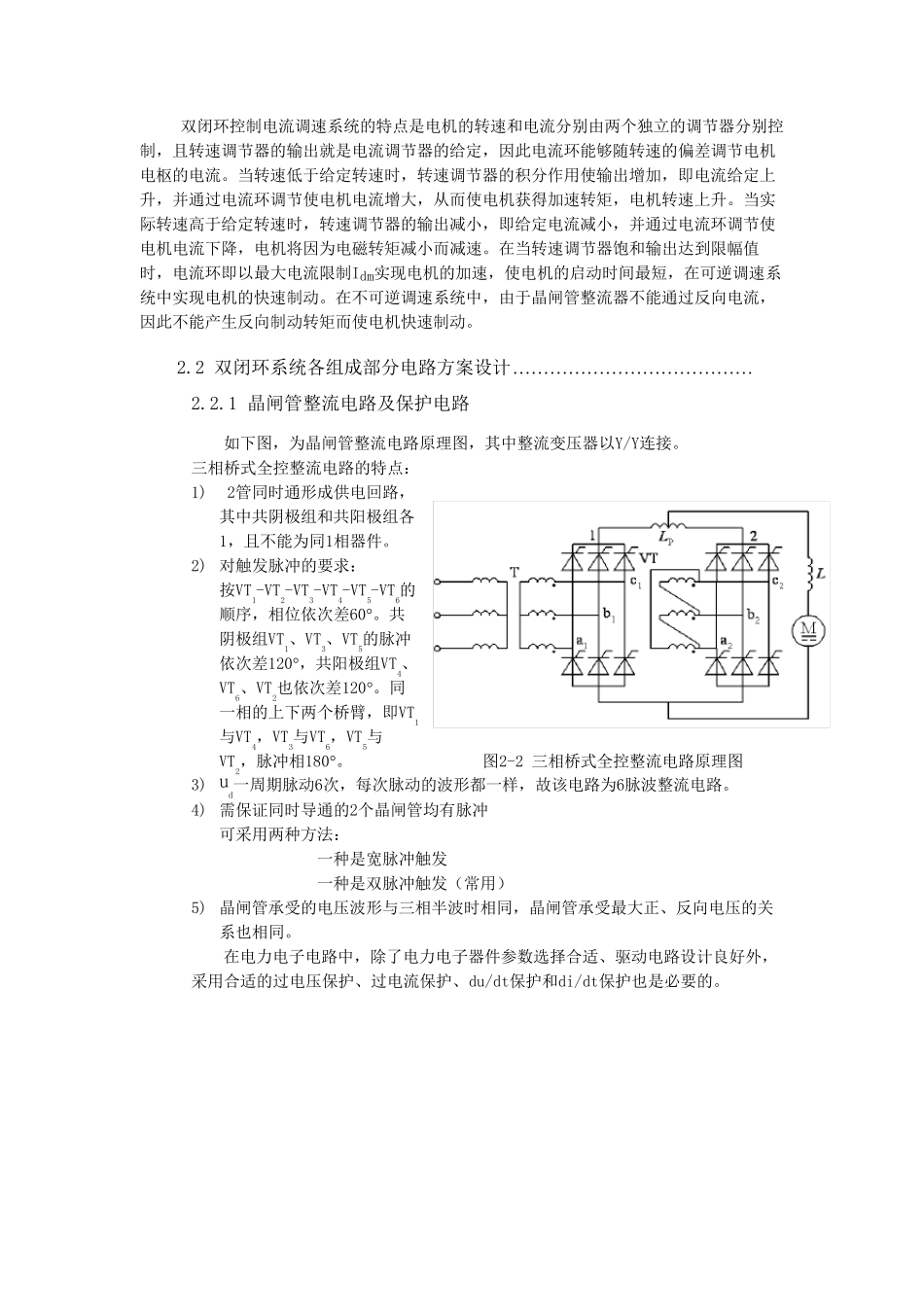
1 晶闸管整流电路及保护电路…………………………………………
2 触发控制电路……………………………………………………… 2
3 系统给定……………………………………………………………
4 检测电路……………………………………………………………
5 调节器的选择………………………………………………………… 2
6 电气控制…………………………………………………………
3 转速、电流调节器的设计计算……………………………………………
1 电流调节器的设计计算………………………………………………… 3
2 转速调节器的设计计算………………………………………………
4 参考文献………………………………………………………………………
5 附录 附录1 直流电机双闭环系统设计图纸 附录2 直流电机转速、电流双闭环调速控制系统实验 附件一:设计说明书书格式要求: 1 设计任务: 1
1 技术数据 (1)用线性集成电路运算 放大器作为调节器的转速、电流无静差直流控制系统,主电路由晶闸管可控整流电路供电的V-M系统 电动机:额定数据 40KW,220V,210A,1000r/min,电枢电阻Ra=0
5Ω,Rrec=0
8,Ks=40 飞轮转矩:Kgm*m=7