交直流调速课程设计说明书 一、方案确定 2
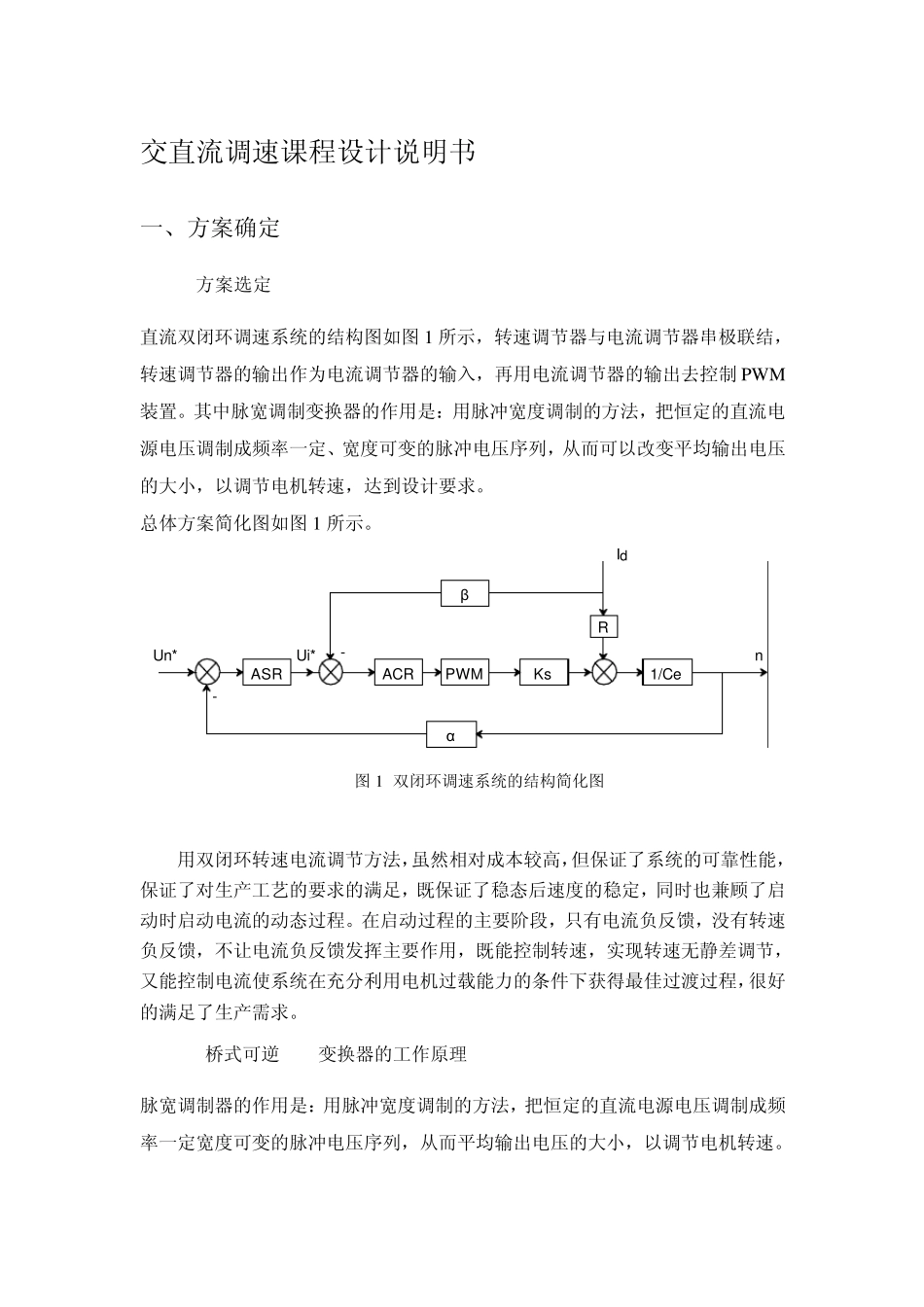
1 方案选定 直流双闭环调速系统的结构图如图 1 所示,转速调节器与电流调节器串极联结,转速调节器的输出作为电流调节器的输入,再用电流调节器的输出去控制 PW M装置
其中脉宽调制变换器的作用是:用脉冲宽度调制的方法,把恒定的直流电源电压调制成频率一定、宽度可变的脉冲电压序列,从而可以改变平均输出电压的大小,以调节电机转速,达到设计要求
总体方案简化图如图 1 所示
ASRACRPWMKsβR1/CeαUn*Ui*nId-- 图 1 双闭环调速系统的结构简化图 用双闭环转速电流调节方法,虽然相对成本较高,但保证了系统的可靠性能,保证了对生产工艺的要求的满足,既保证了稳态后速度的稳定,同时也兼顾了启动时启动电流的动态过程
在启动过程的主要阶段,只有电流负反馈,没有转速负反馈,不让电流负反馈发挥主要作用,既能控制转速,实现转速无静差调节,又能控制电流使系统在充分利用电机过载能力的条件下获得最佳过渡过程,很好的满足了生产需求
2 桥式可逆 PWM变换器的工作原理 脉宽调制器的作用是:用脉冲宽度调制的方法,把恒定的直流电源电压调制成频率一定宽度可变的脉冲电压序列,从而平均输出电压的大小,以调节电机转速
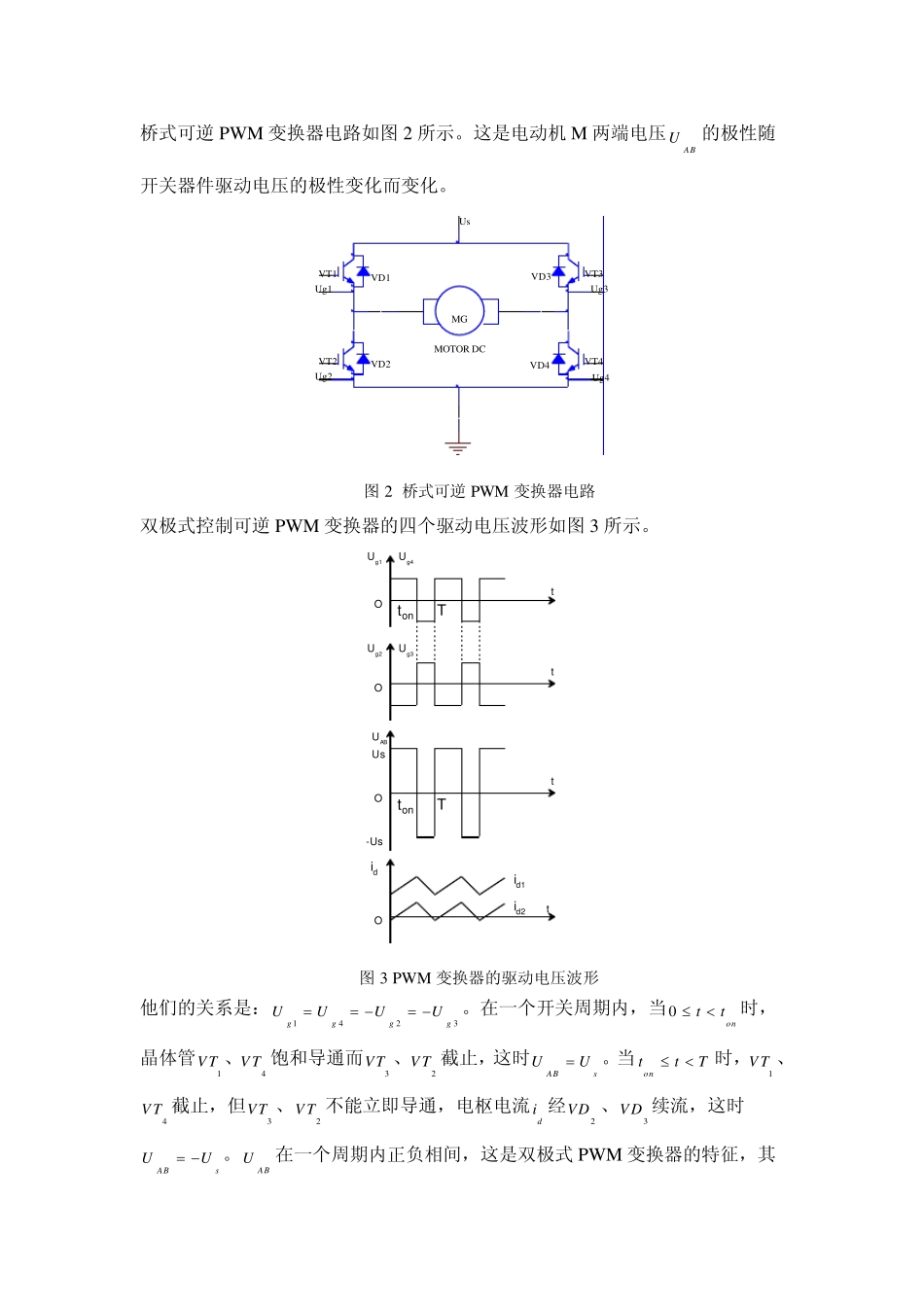
桥式可逆PWM 变换器电路如图2 所示
这是电动机M 两端电压ABU的极性随开关器件驱动电压的极性变化而变化
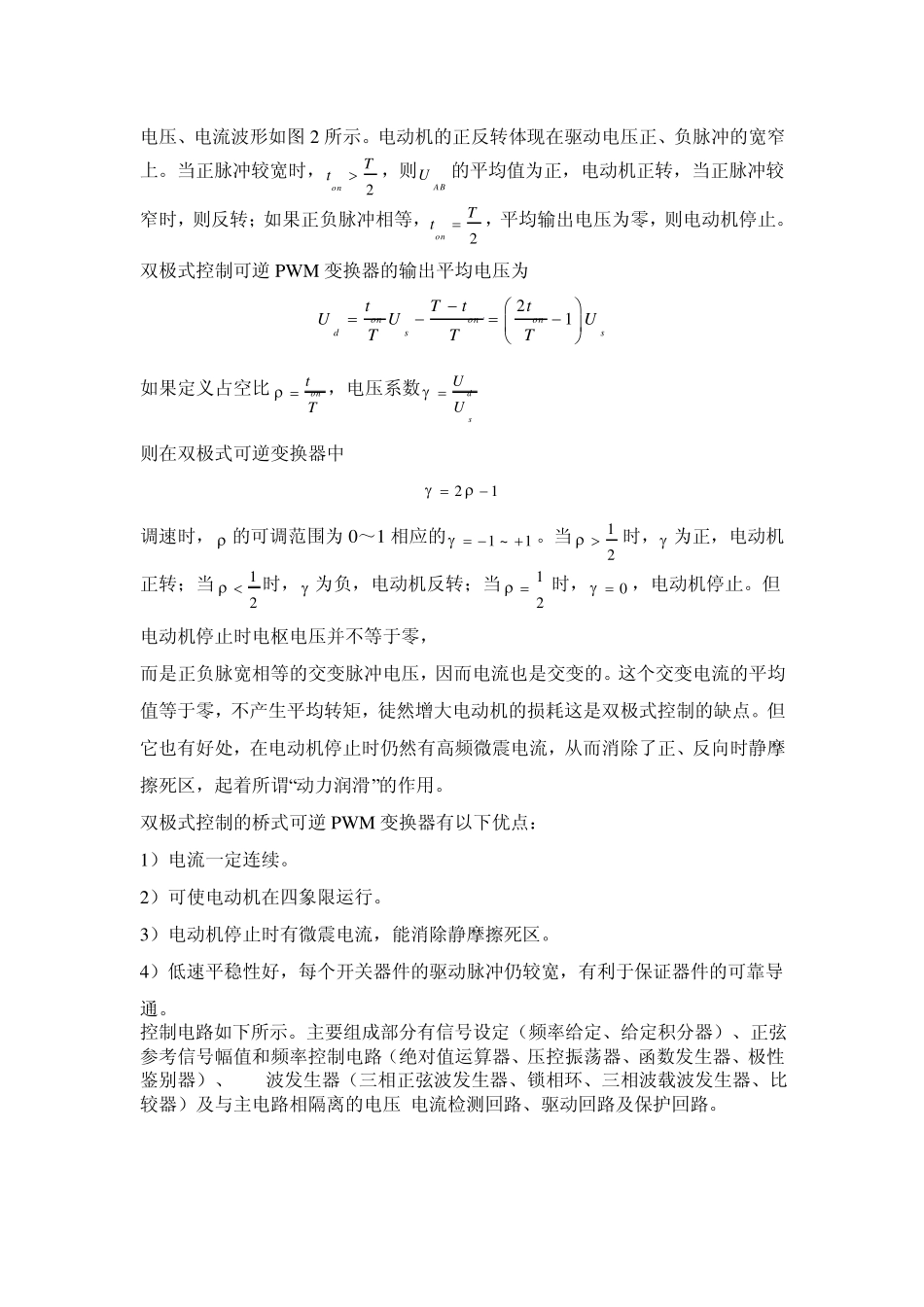
MGMOTOR DCVT1VT2VD1VD2VT3VT4VD3VD4Ug1Ug2Ug3Ug4Us 图2 桥式可逆PWM 变换器电路 双极式控制可逆PWM 变换器的四个驱动电压波形如图3 所示
OOOOUg1Ug4Ug2Ug3UABUs-Usidid1id2tttttonTtonT 图3 PWM 变换器的驱动电压波形 他们的关系是:1423ggggUUUU
在一个开关周期内,当0ontt时,晶