Sensor抽才--jPerceptionEnvironmentalPerceptionPlannineSoftwar无人驾驶汽车系统基本框架无人驾驶系统的核心可以概述为三个部分:感知(Perception),规划(Planning)和控制(Control),这些部分的交互以及其与车辆硬件、其他车辆的交互可以用下图表示:TrajectoryTrack
ngHardware感知是指无人驾驶系统从环境中收集信息并从中提取相关知识的能力
其中,环境感知(EnvironmentalPerception)特指对于环境的场景理解能力,例如障碍物的位置,道路标志/标记的检测,行人车辆的检测等数据的语义分类
一般来说,定位(Localization)也是感知的一部分,定位是无人车确定其相对于环境的位置的能力
规划是无人车为了某一目标而作出一些有目的性的决策的过程,对于无人驾驶车辆而言这个目标通常是指从出发地到达目的地,同时避免障碍物,并且不断优化驾驶轨迹和行为以保证乘客的安全舒适
规划层通常又被细分为任务规划(MissionPlanning),行为规划(BehavioralPlanning)和动作规划(MotionPlanning)三层
最后,控制则是无人车精准地执行规划好的动作的能力,这些动作来源于更高的层
01感知环境感知为了确保无人车对环境的理解和把握,无人驾驶系统的环境感知部分通常需要获取周围环境的大量信息,具体来说包括:障碍物的位置,速度以及可能的行为,可行驶的区域,交通规则等等
无人车通常是通过融合激光雷达(Lidar),相机(Camera),毫米波雷达(MillimeterWaveRadar)等多种传感器的数据来获取这些信息,本节我们简要地了解一下激光雷达和相机在无人车感知中的应用
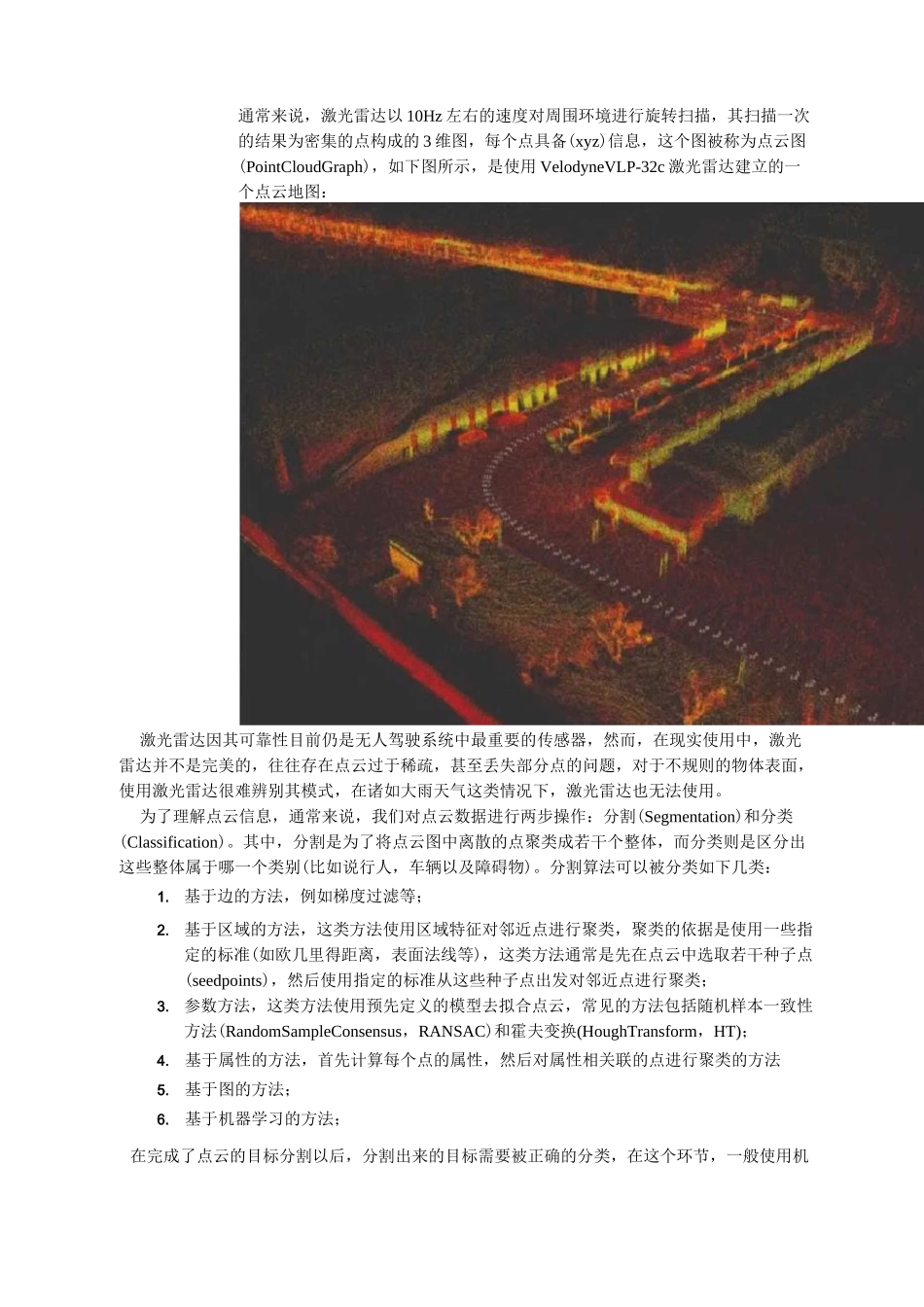
激光雷达是一类使用激光进行探测和测距的设备,它能够每秒钟向环境发送数百万光脉冲,它的内部是一种