积分分离PID控制仿真实验 自动化1005 0704100528 王亚丹 一、实验目的与要求 1、学会 PID 三个系统的选取
2、了解积分分离值的模拟实验选取
3、掌握 SIMULINK 的仿真方法
二、仿真软硬件环境 PC 机,MATLAB5
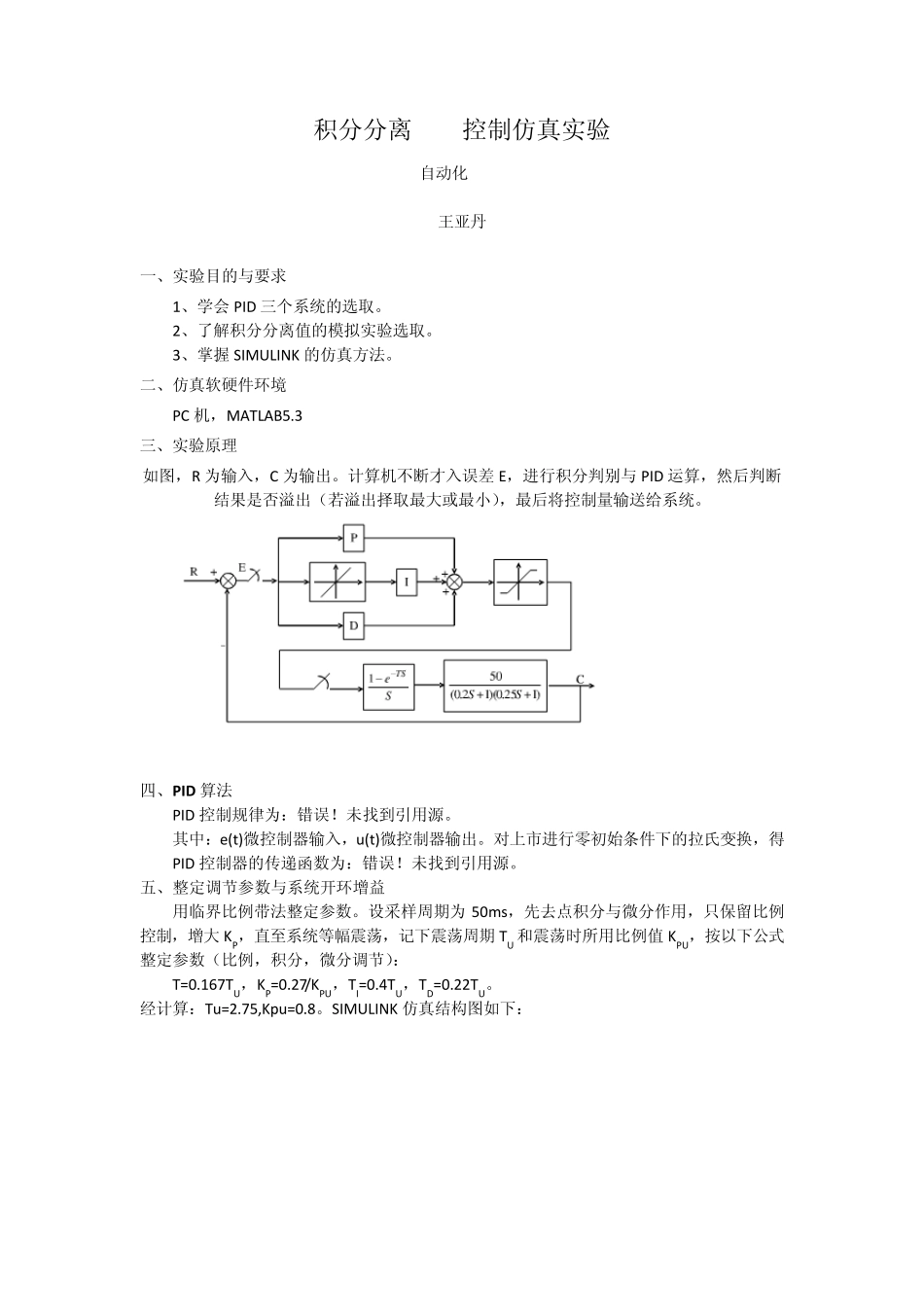
3 三、实验原理 如图,R 为输入,C 为输出
计算机不断才入误差 E,进行积分判别与 PID 运算,然后判断结果是否溢出(若溢出择取最大或最小),最后将控制量输送给系统
四、P ID 算法 PID 控制规律为:错误
未找到引用源
其中:e(t)微控制器输入,u (t)微控制器输出
对上市进行零初始条件下的拉氏变换,得PID 控制器的传递函数为:错误
未找到引用源
五、整定调节参数与系统开环增益 用临界比例带法整定参数
设采样周期为 50ms,先去点积分与微分作用,只保留比例控制,增大 KP,直至系统等幅震荡,记下震荡周期 TU 和震荡时所用比例值 KPU,按以下公式整定参数(比例,积分,微分调节): T=0
167TU,KP=0
27/KPU,TI=0
4TU,TD=0
经计算:Tu =2
75,Kpu =0
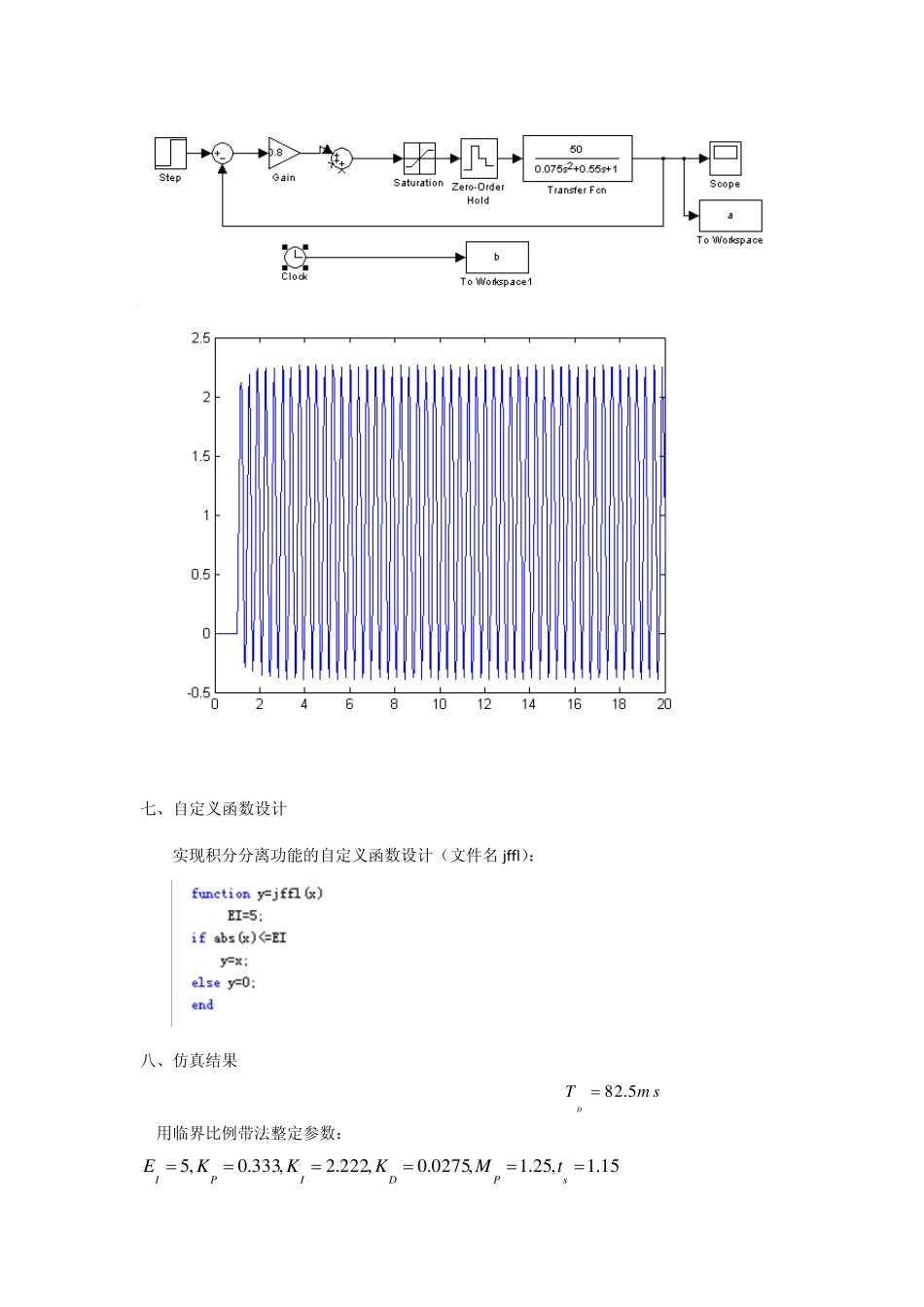
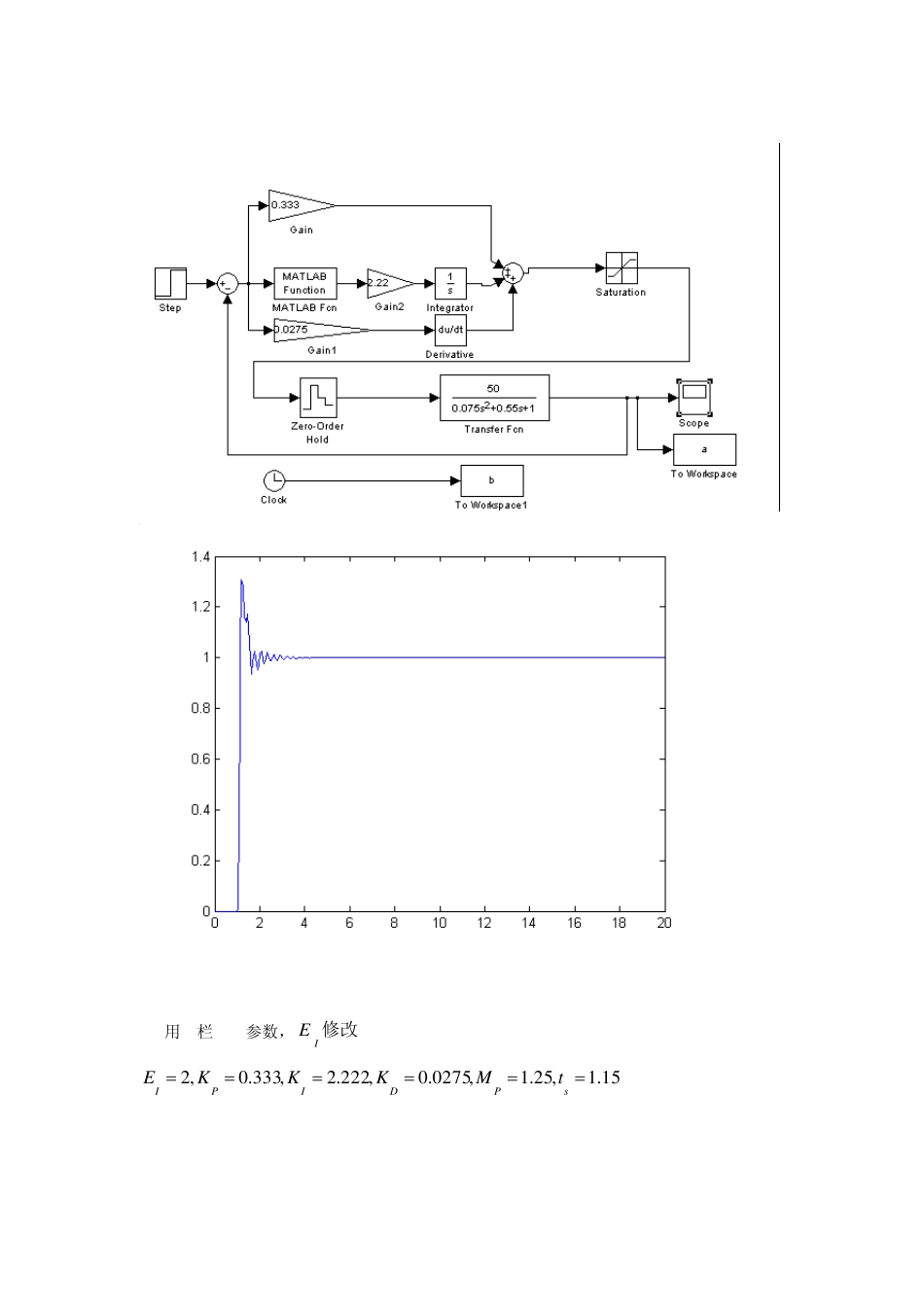
SIMULINK 仿真结构图如下: 七、自定义函数设计 实现积分分离功能的自定义函数设计(文件名 jffl): 八、仿真结果 Ttest=50ms,Tu=375ms,Kpu=0
8,T=63ms,Kp=0
333,T=150ms,m sTD5
8 2I 用临界比例带法整定参数:1 5
1,0 2 7 5
0,2 2 2
2,3 3 3
0,5sPDIPItMKKKE II 用I栏PID参数,修改IE: 1 5
1,0 2 7 5
0,2 2 2
2,3 3 3
0,2sPDIPItMKKKE III 较佳的 P ID 参数,5IE IV 用II