1 一、控制系统的数学模型 1 、传递函数的定义 线性定常系统的传递函数,定义为零初始条件下,系统输出量的拉氏变换与输入量的拉氏变换之比, sNsMasasasabsbsbsbsRsCsGnnnnmmmm11101110 2 、传递函数的零点和极点 传递函数的分子多项式和分母多项式经因式分解后可写为如下形式: njjmiinmpszsKpspspsazszszsbsG11*210210,式中,mizi,,2,1称为传递函数的零点;njpj,,2,1称为传递函数的极点;系数00*/ abK,在零极点分布图中,用“o ”表示零点,用“×”表示极点
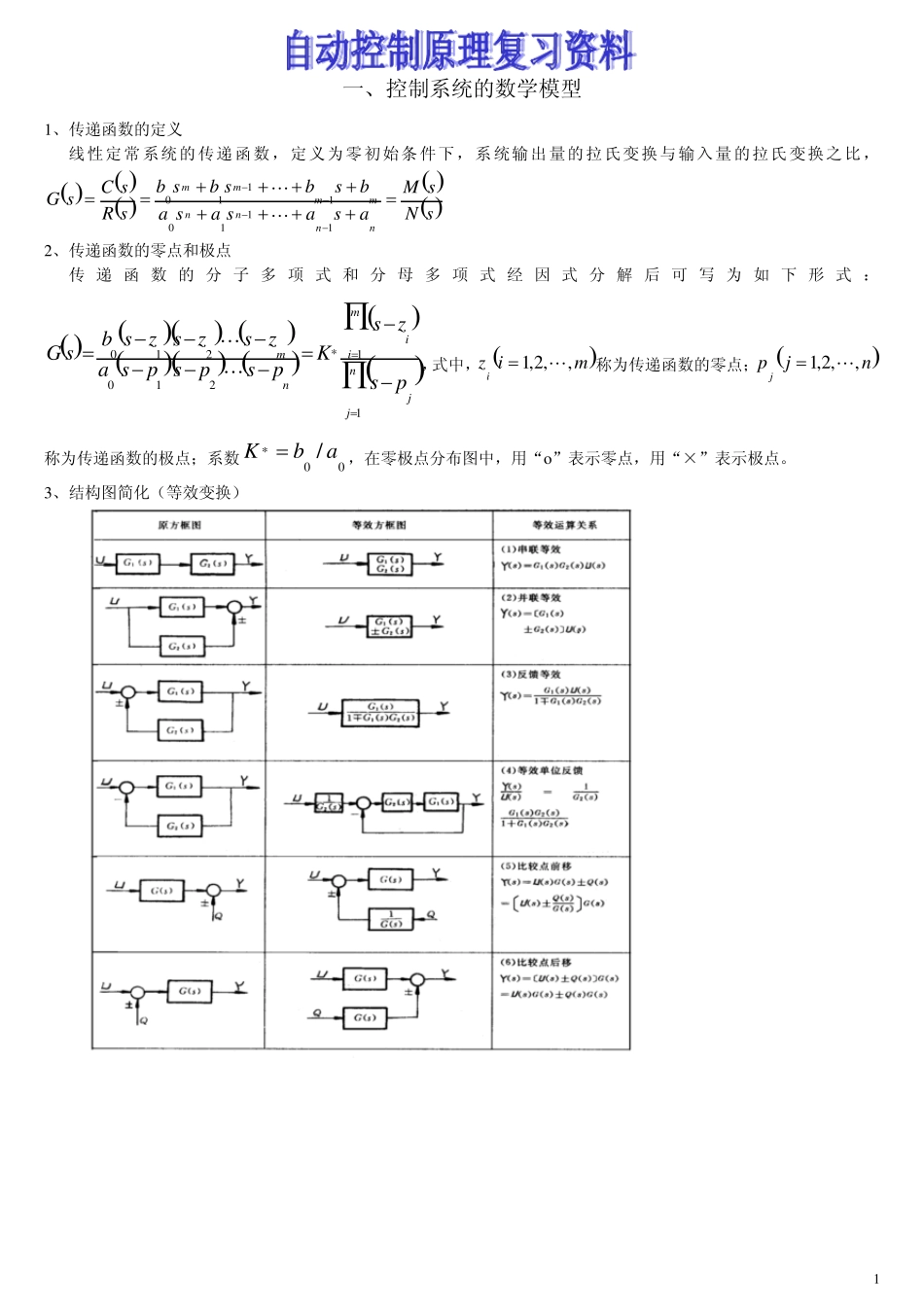
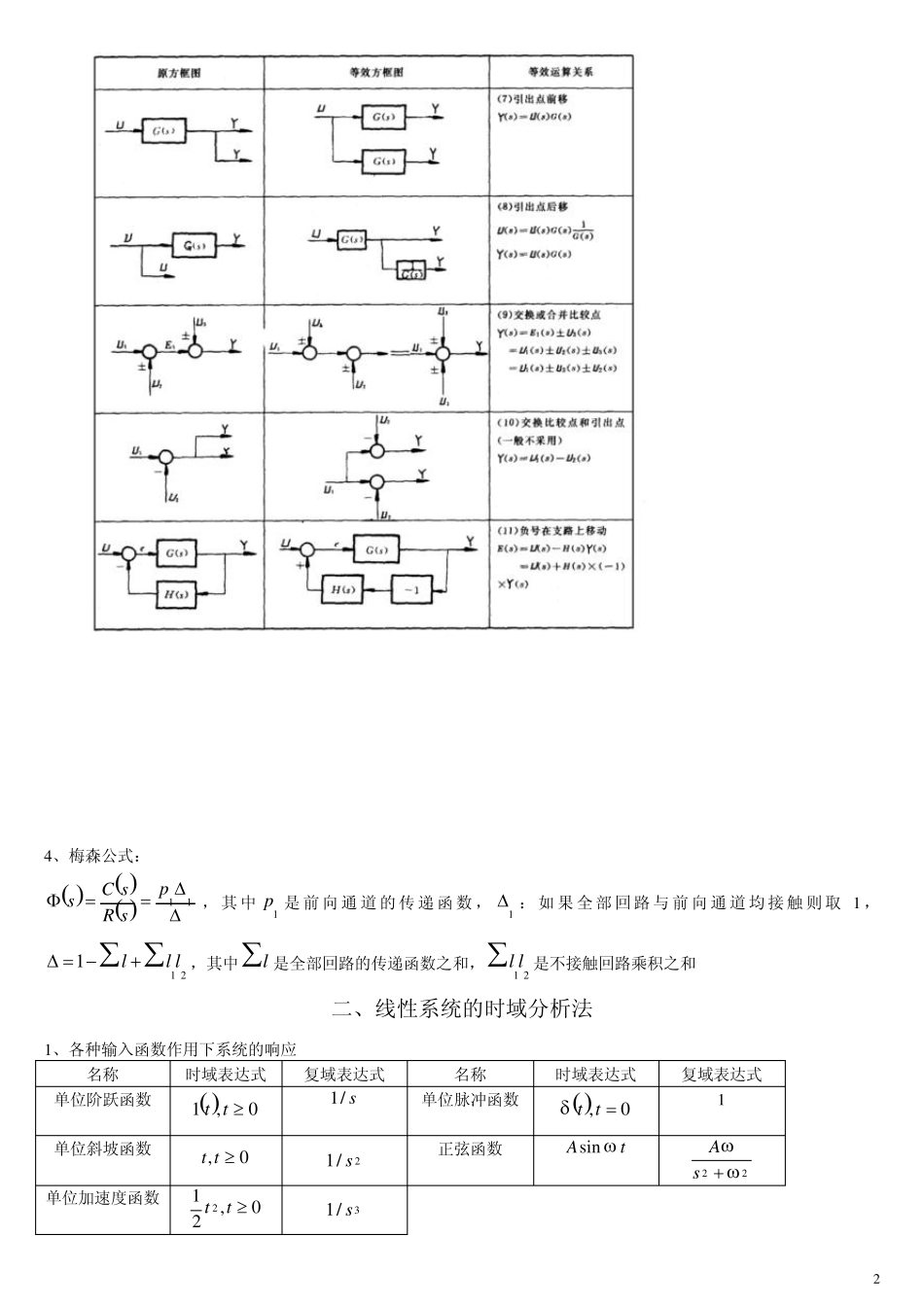
3 、结构图简化(等效变换) 2 4、梅森公式: 11psRsCs, 其 中1p 是 前 向 通 道 的 传 递 函 数 ,1 : 如 果 全 部 回 路 与 前 向 通 道 均 接 触 则 取 1 ,211lll ,其中l 是全部回路的传递函数之和,21ll是不接触回路乘积之和 二、线性系统的时域分析法 1、各种输入函数作用下系统的响应 名称 时域表达式 复域表达式 名称 时域表达式 复域表达式 单位阶跃函数 0,1tt s/1 单位脉冲函数 0, tt 1 单位斜坡函数 0, tt 2/1 s 正弦函数 tA sin 22sA 单位加速度函数 0,212tt 3/1 s 3 2 、二阶系统的闭环传递函数的标准形式: 2222nnnsssRsCs 3 、欠阻尼1二阶系统的动态过程参量 (1 )延迟时间:ndt7
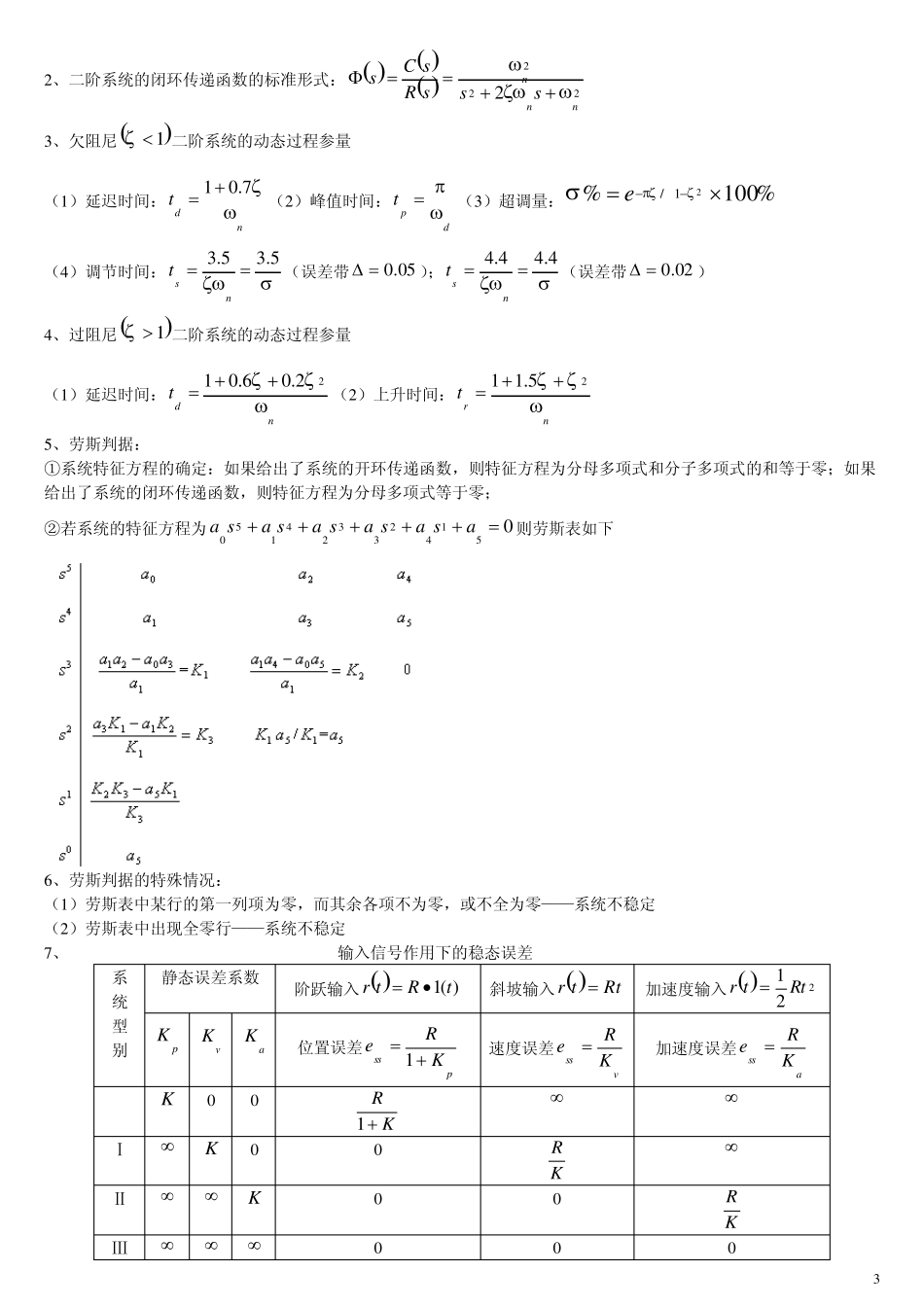
01 (2 )峰值时间:dpt(3