自动控制原理课程设计 1 一、设计目的 1
了解控制系统设计的一般方法、步骤
掌握对系统进行稳定性的分析、稳态误差分析以及动态特性分析的方法
掌握利用 MATLAB 对控制理论内容进行分析和研究的能力
提高分析问题解决问题的能力
二、设计内容与要求 设计内容 1
阅读有关资料
对系统进行稳定性分析、稳态误差分析以及动态特性分析
绘制根轨迹图、Bode 图、Nyquist 图
设计校正系统,满足工作要求
设计要求 1
能用 MATLAB 解复杂的自动控制理论题目
能用 MATLAB 设计控制系统以满足具体的性能指标
能灵活应用 MATLAB 的 CONTROL SYSTEM 工具箱和 SIMULINK 仿真软件,分析系统的性能
试验设备、环境 装有 MATLAB 软件的计算机一台
三、设计步骤 已知开环传递函数为40()(0
06251)G SSSS 1
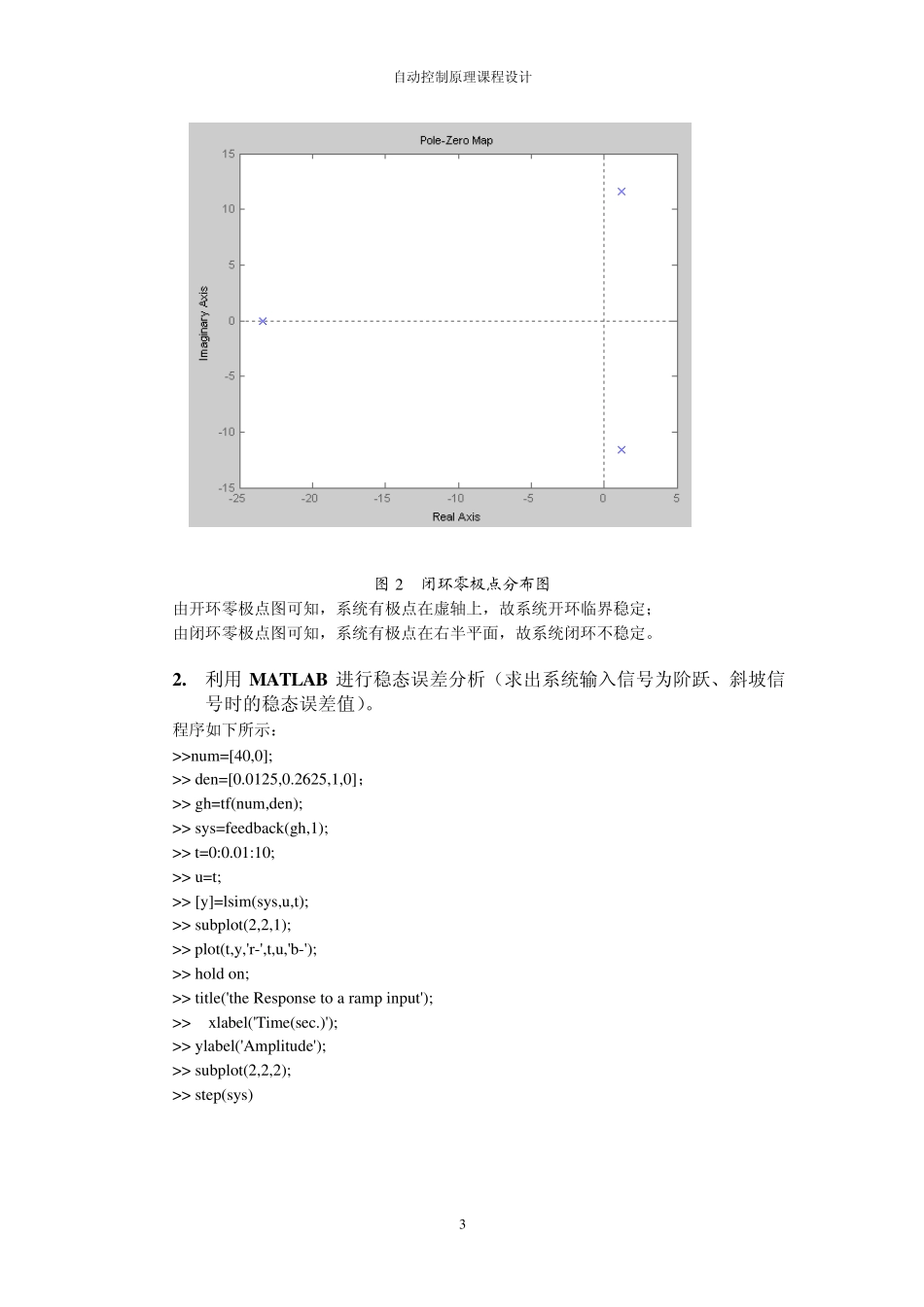
利用 MATLAB 函数求根,并判断系统稳定性
程序如下所示: >> num=[40]; >> den=[0
0125 0
2625 1 0] den = 0
0125 0
2625 1
0000 0 >> g=tf(num,den) ; >> sys=feedback(g,1); >> pzmap(g); >> num=[40]; >> den=[0
0125 0
2625 1 40] den = 0
0125 0
2625 1
0000 40
0000 >> t=tf(num,den); >> pzmap(t); >> [p,z]=pzmap(g); >> p1=p;z1=z; 自动控制原理课程设计 2 >> disp('开环极点'); 开环极点 >> disp(p1); 0 -16 -5 >> dis