6-1 证明RC 无源超前校正环节 111,111sTsszTTsspsT 最大超前相角为 1arcsin1m 采用半对数坐标时最大超前相角所对应的频率位于两个转折频率的中间或等于零、极点乘积的平方根,即 1mzpT 6-2 某单位反馈控制系统的设计指标为上升时间0
1rt 秒,超调量%16%,斜坡输入下的稳态误差0
05ssve
(a)试问系统开环频率特性的低频段需要满足什么要求
中频段需要满足什么要求
(b)在 s 平面内绘制出能满足设计要求的系统主导极点所在的区域
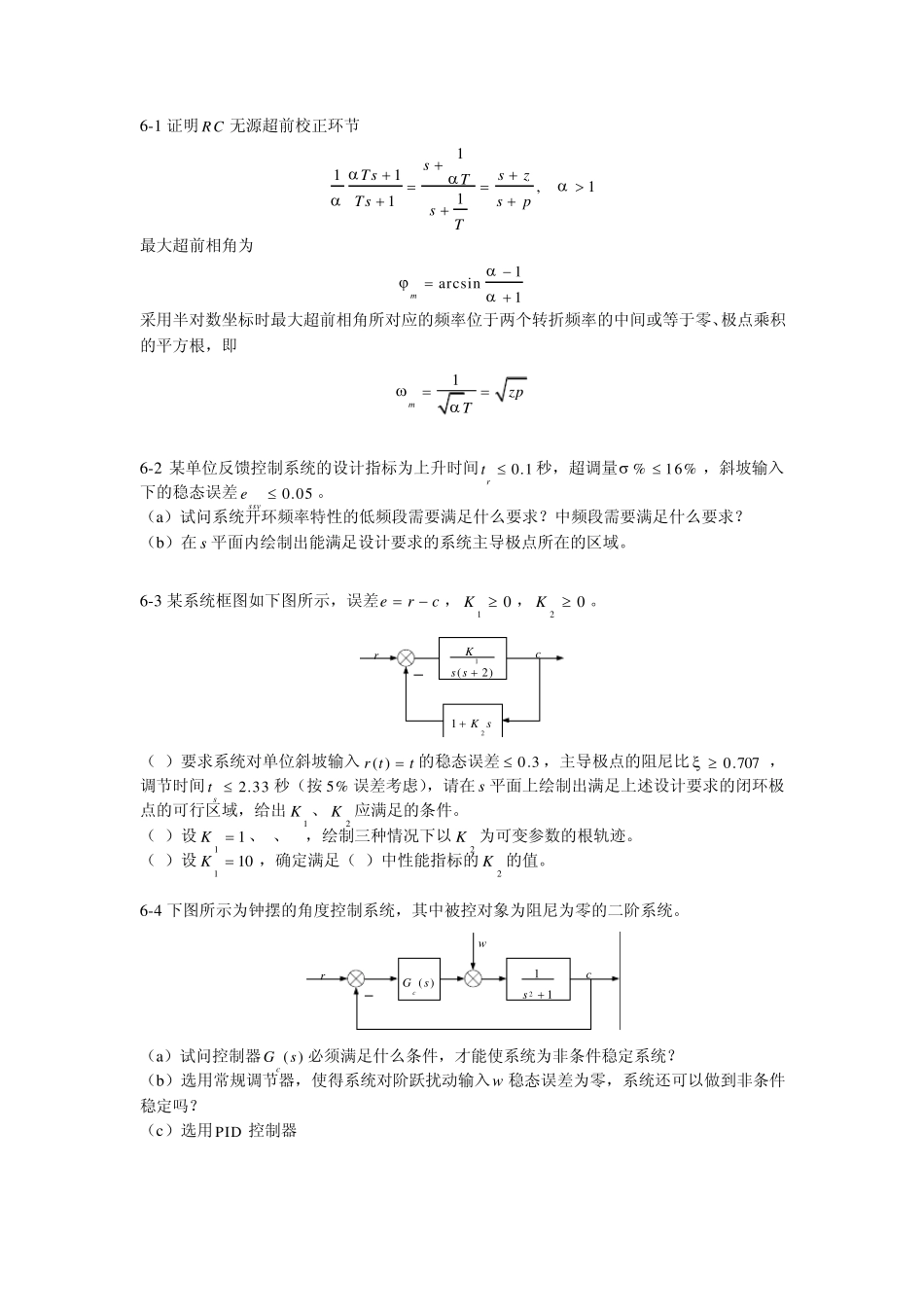
6-3 某系统框图如下图所示,误差cre,01 K,02 K
1(2)Ks s 21K src (a)要求系统对单位斜坡输入ttr)(的稳态误差3
0,主导极点的阻尼比707
0,调节时间2
33st 秒(按 5% 误差考虑),请在 s 平面上绘制出满足上述设计要求的闭环极点的可行区域,给出1K 、2K 应满足的条件
(b)设11 K、2、10,绘制三种情况下以2K 为可变参数的根轨迹
(c)设101 K,确定满足(a)中性能指标的2K 的值
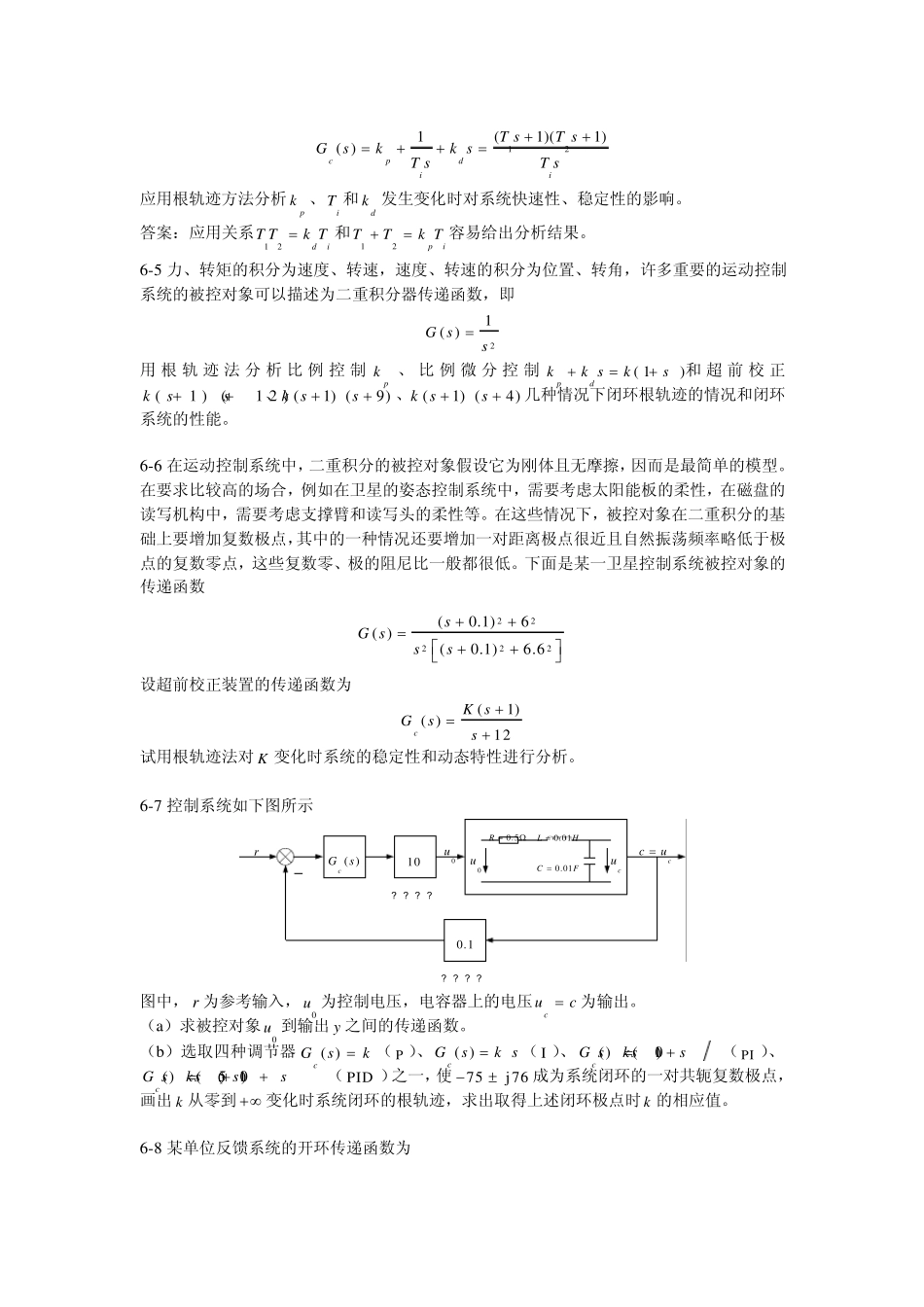
6-4 下图所示为钟摆的角度控制系统,其中被控对象为阻尼为零的二阶系统
cr( )cGs211sw (a)试问控制器( )cGs 必须满足什么条件,才能使系统为非条件稳定系统
(b)选用常规调节器,使得系统对阶跃扰动输入w 稳态误差为零,系统还可以做到非条件稳定吗
(c)选用PID 控制器 12(1)(1)1( )cpdiiT sT sGskk sT sT s 应用根轨迹方法分析pk 、iT 和dk 发生变化时对系统快速性、稳定性的影响
答案:应用关系12diT Tk T和12piTTk T容易给出分析结果
6-5 力、转矩的积分为速度、转速,速