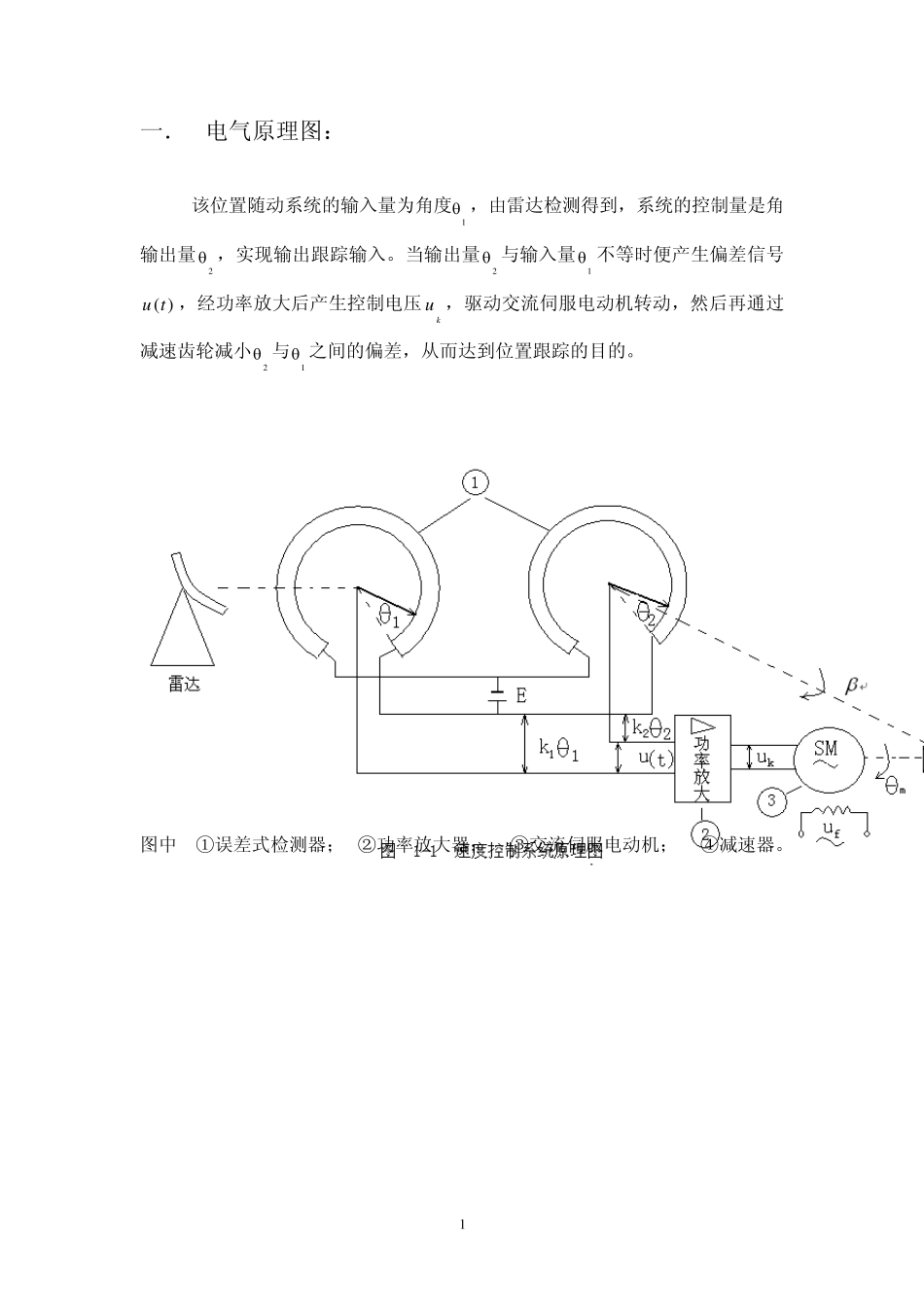
1 一. 电气原理图: 该位置随动系统的输入量为角度1 ,由雷达检测得到,系统的控制量是角输出量2 ,实现输出跟踪输入
当输出量2 与输入量1 不等时便产生偏差信号( )u t ,经功率放大后产生控制电压ku,驱动交流伺服电动机转动,然后再通过减速齿轮减小2 与1 之间的偏差,从而达到位置跟踪的目的
图中 ①误差式检测器; ②功率放大器; ③交流伺服电动机; ④减速器
2 二.各环节的数学模型及传递函数 (1)误差检测器 误差检测器是由一对电位器组成的
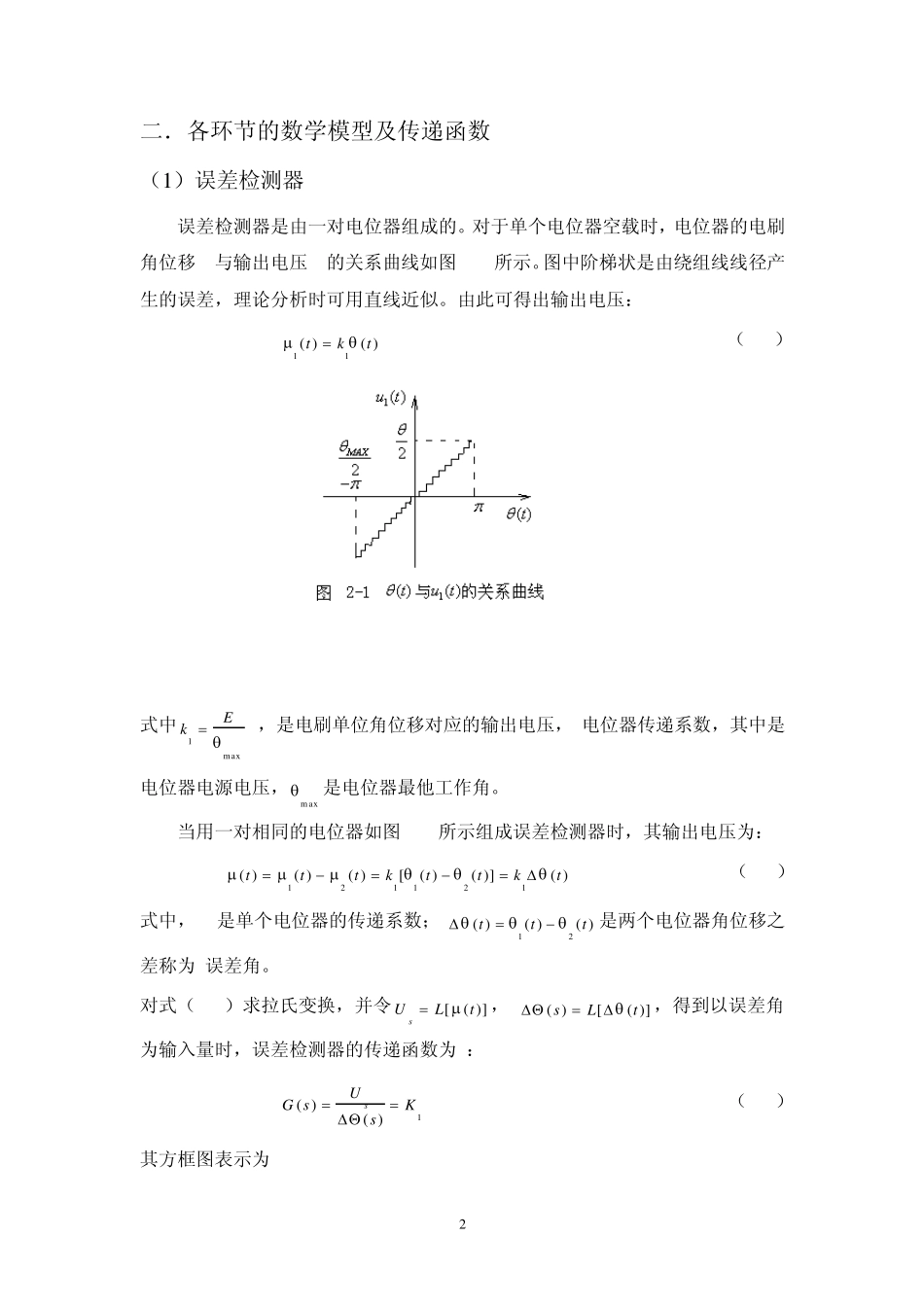
对于单个电位器空载时,电位器的电刷角位移 与输出电压 的关系曲线如图 2-1所示
图中阶梯状是由绕组线线径产生的误差,理论分析时可用直线近似
由此可得出输出电压: 11( )( )tkt (2-1) 式中1maxEk ,是电刷单位角位移对应的输出电压, 电位器传递系数,其中是电位器电源电压,max是电位器最他工作角
当用一对相同的电位器如图 1-1所示组成误差检测器时,其输出电压为: 121121( )( )( )[( )( )]( )tttkttkt (2-2) 式中,K1是单个电位器的传递系数; 12( )( )( )ttt是两个电位器角位移之差称为 误差角
对式(2-2)求拉氏变换,并令[( )]sULt, ( )[( )]sLt,得到以误差角为输入量时,误差检测器的传递函数为 : 1( )( )sUG sKs (2-3) 其方框图表示为 3 (2)功率放大器 由于角位移差( )u t 很小,因此,由误差检测器输出电压U(t)也很小,如此以此电压直接地加在交流伺服电动机上,将无法使其正常工作
因此,有必要在中间加个功率放大器对 U(t)进行放大,又由于功率放大器的输入阻抗无穷大,因而对误差检测器来说也就忽略了负载效应