舵机基础知识: 最近几年国内机器人开始起步发展,很多高校、中小学都开始进行机器人技术教学
小型的机器人、模块化的机器人、组件式的机器人是教学机器人的首选
在这些机器人产品中,舵机是最关键,使用最多的部件
根据控制方式,舵机应该称为微型伺服马达
早期在模型上使用最多,主要用于控制模 型的舵面,所以俗称舵机
舵机接受一个简单的控制指令就可以自动转动到一个比较精确的 角度,所以非常适合在关节型机器人产品使用
仿人型机器人就是舵机运用的最高境界
一、 舵机的结构 舵机简单的说就是集成了直流电机、电机控制器和减速器等,并封装在一个便于安装的外壳里的伺服单元
能够利用简单的输入信号比较精确的转动给定角度的电机系统
舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度
这样的直流电机控制方式叫闭环控制,所以舵机更准确的说是伺服马达,英文 servo
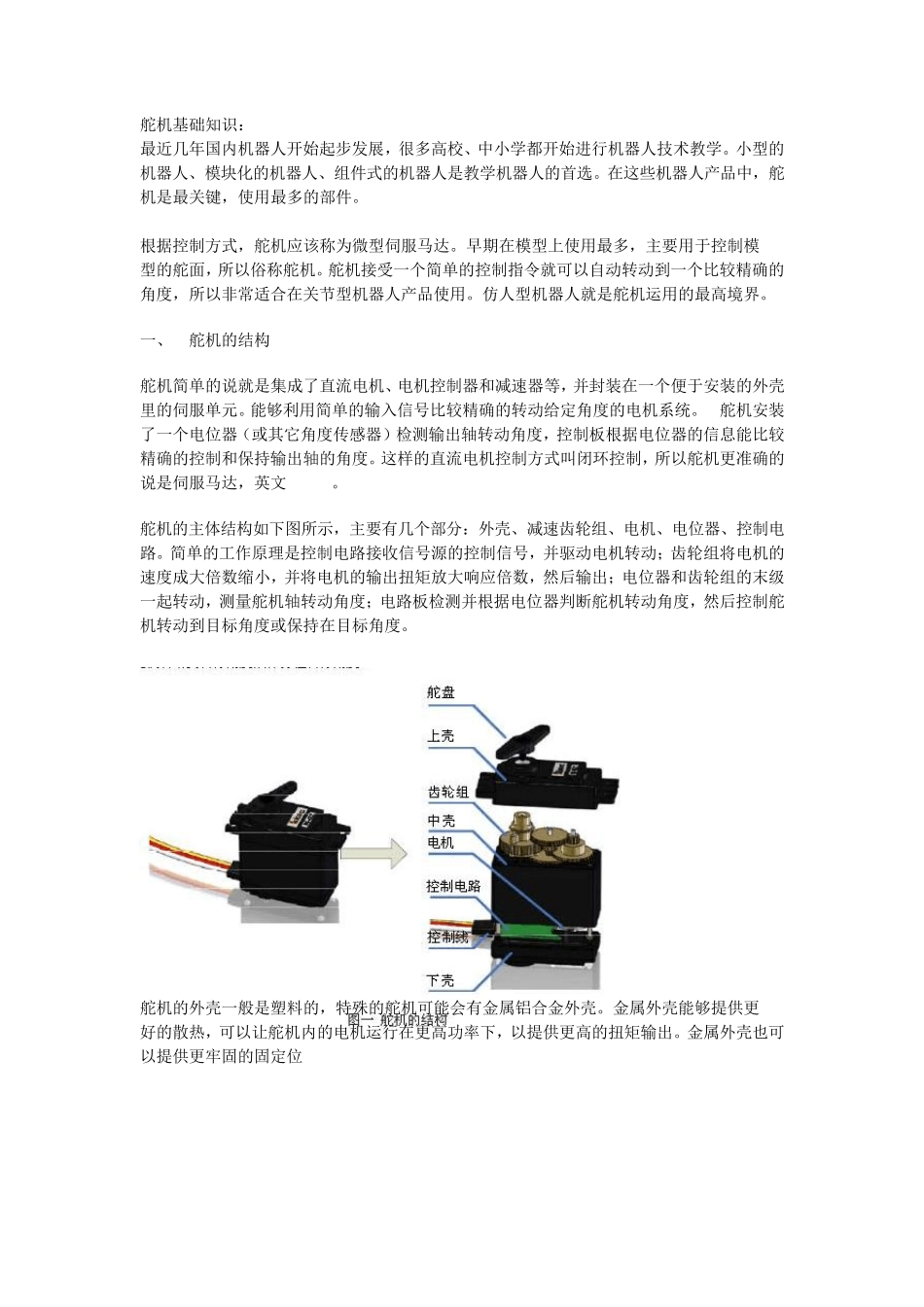
舵机的主体结构如下图所示,主要有几个部分:外壳、减速齿轮组、电机、电位器、控制电路
简单的工作原理是控制电路接收信号源的控制信号,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度
舵机的外壳一般是塑料的,特殊的舵机可能会有金属铝合金外壳
金属外壳能够提供更 好的散热,可以让舵机内的电机运行在更高功率下,以提供更高的扭矩输出
金属外壳也可 以提供更牢固的固定位 齿轮箱有塑料齿轮、混合齿轮、金属齿轮的差别
塑料齿轮成本底,噪音小,但强度较低;金属齿轮强度高,但成本高,在装配精度一般的情况下会有很大的噪音
小扭矩舵机、微舵、扭矩大但功率密度小的舵机一般都用塑料齿轮,如 Futaba 3003,辉盛的 9g