原题目:(30)题:如图 1-1 所示机构,已知机构各构件的尺寸为AB=100mm,BC=2
73AB,CD=1
36AB,CG=2
32AB,BG=4
9AB,AF=2
36AB,AD=2
87AB,DF=2AB,GE=1
45AB,EF=2
82AB,GM=1
36AB,MK=1
91AB,KD=0
54AB,KF=2
18AB,HF=3
1AB,DH=3
63AB,,构件 1的角速度为
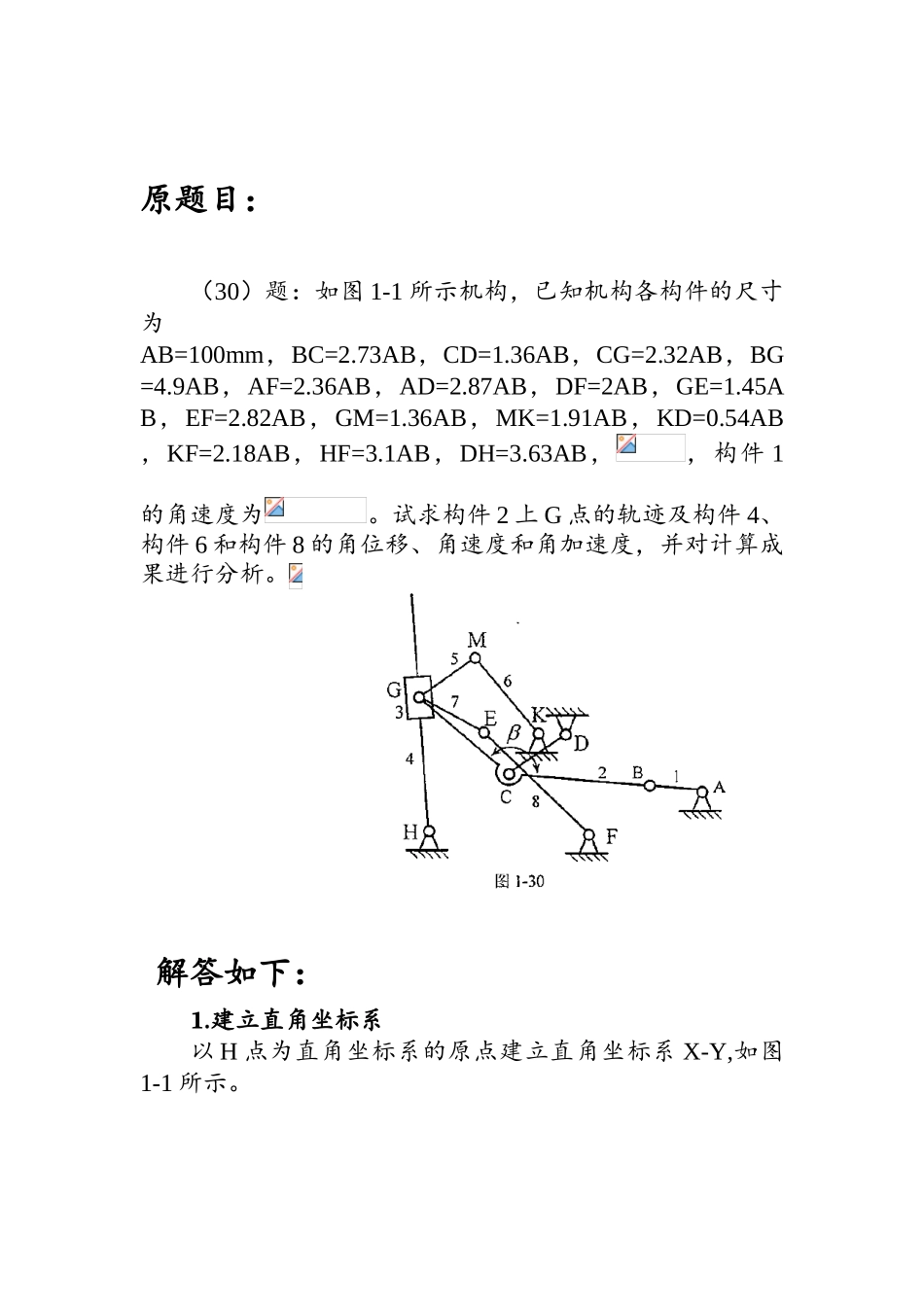
试求构件 2 上 G 点的轨迹及构件 4、构件 6 和构件 8 的角位移、角速度和角加速度,并对计算成果进行分析
解答如下:1
建立直角坐标系以 H 点为直角坐标系的原点建立直角坐标系 X-Y,如图1-1 所示
图 1-12
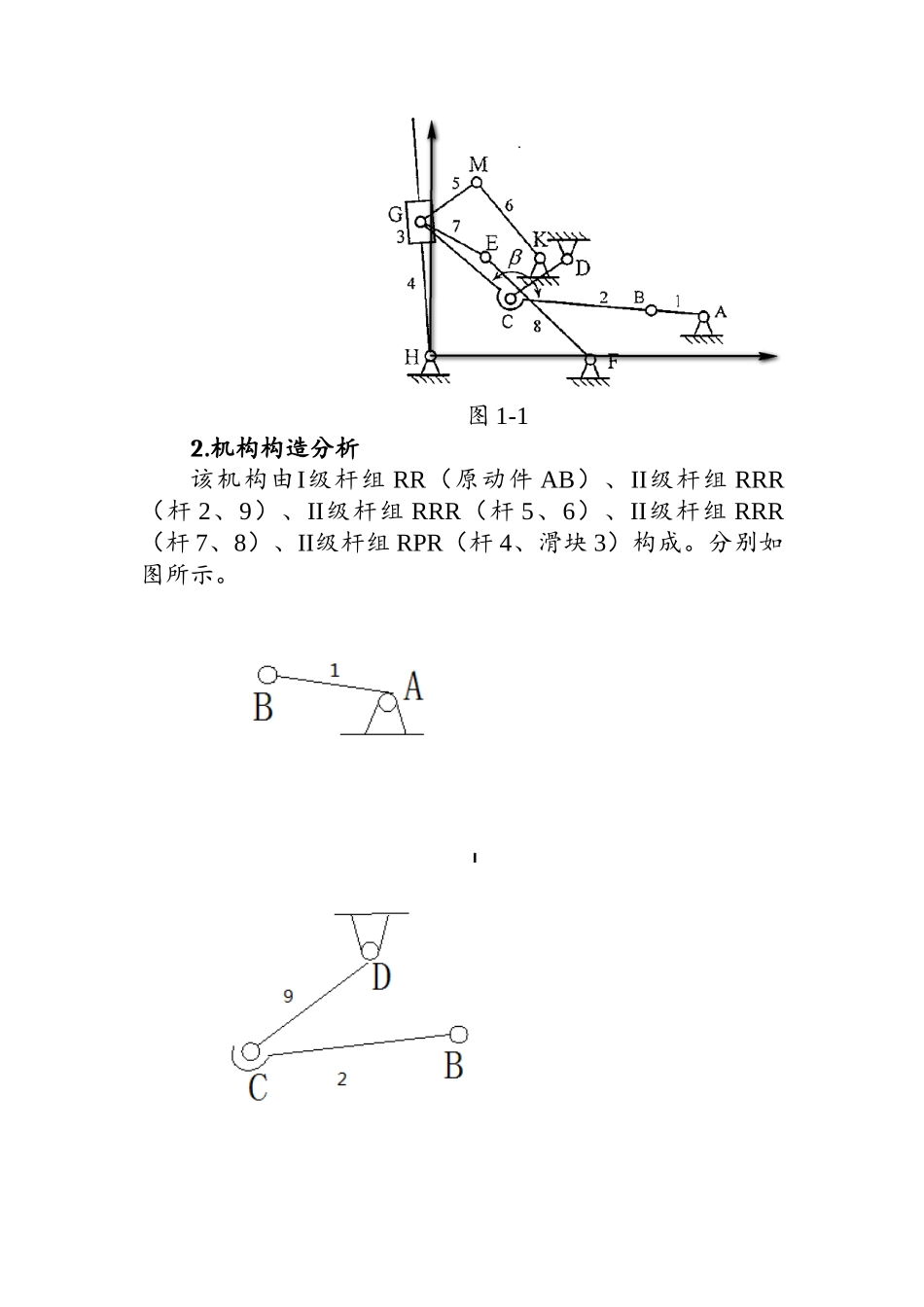
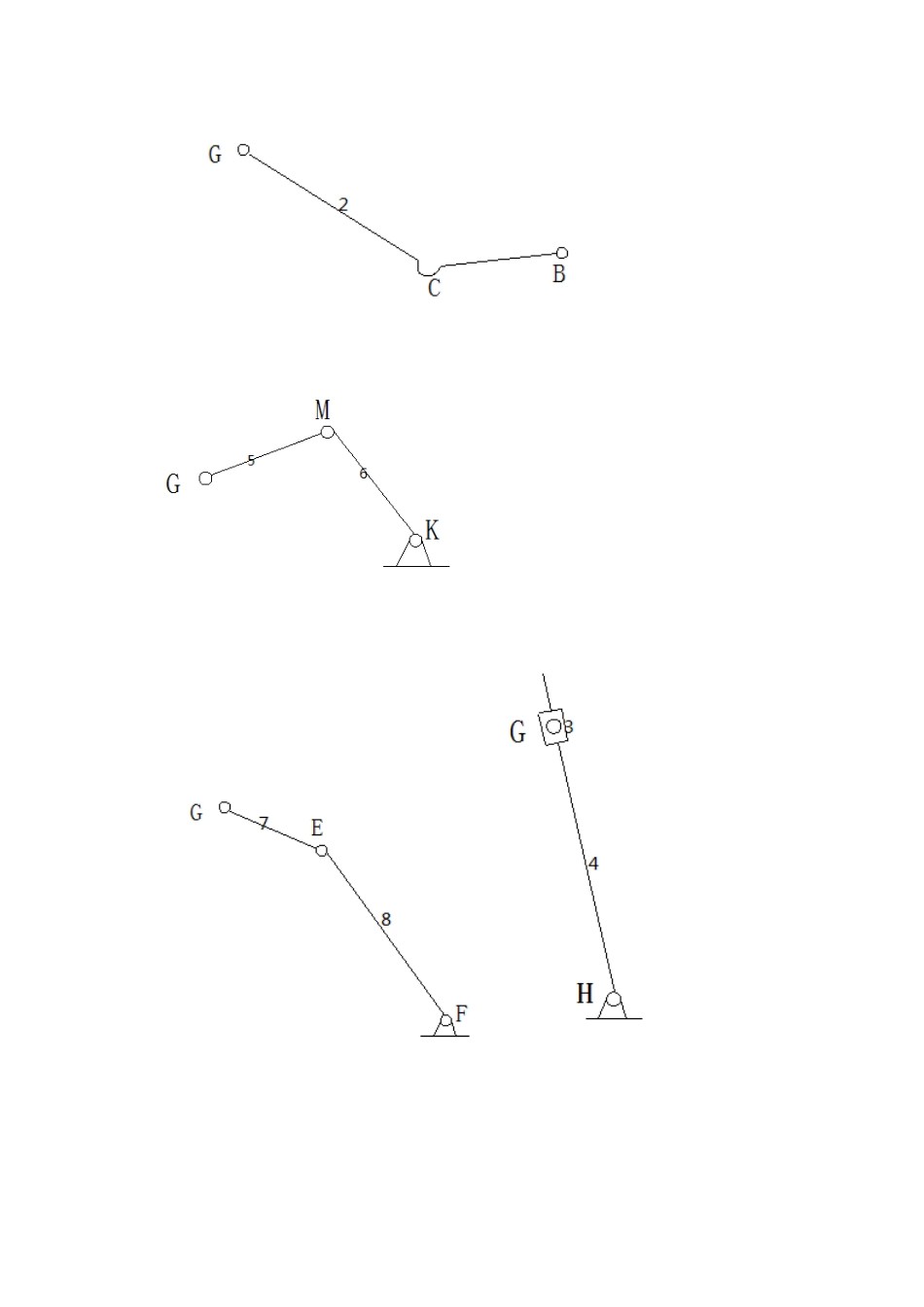
机构构造分析该机构由I级杆组 RR(原动件 AB)、II级杆组 RRR(杆 2、9)、II级杆组 RRR(杆 5、6)、II级杆组 RRR(杆 7、8)、II级杆组 RPR(杆 4、滑块 3)构成
分别如图所示
各基本杆组运动分析1
I级杆组 RR(原动件 AB) 如图所示,已知原动件杆 1 的转角,,角速度,角加速度,运动副 A 的位置坐标为 xA = 542
3mm,yA = 41
5mm,速度为,加速度为,原动件杆 1 的长度 lAB = 100mm
1)位置分析 2)速度和加速度分析 将已知参数带入可求出
II级杆组 RRR(杆 2、9)如图所示,已求出运动副 B 的位置、速度、 加 速 度, 运 动 副 D 的 位 置 坐 标 为,速度为,加速度为,杆长
(1)杆 2 的角位置、角速度、角加速度 B、D 连线与 x 轴的夹角为: 杆 BC 的位置角为: 杆 BC 的角速度为: 式中 杆 BC 的角加速度为 : 式中 将已知量带入可求得
II级杆组 RRR(杆 5、6)如图所示,已求出 G 点的位置、速度、加速度,K 点的位置坐标为,速