中国硕士数学建模竞赛 E 题多无人机对组网雷达的协同干扰 组网雷达系统是应用两部或两部以上空间位置互相分离而覆盖范围互相重叠的雷达的观测或判断来实行搜索、跟踪和识别目的的系统,综合应用了多种抗干扰措施,具有较强的抗干扰能力,因而在军事中得到了广泛应用
怎样对组网雷达实行行之有效的干扰,是当今电子对抗界面临的一种重大问题
诸多干扰方式中较为有效的是欺骗干扰,包括距离欺骗、角度欺骗、速度欺骗以及多参数欺骗等
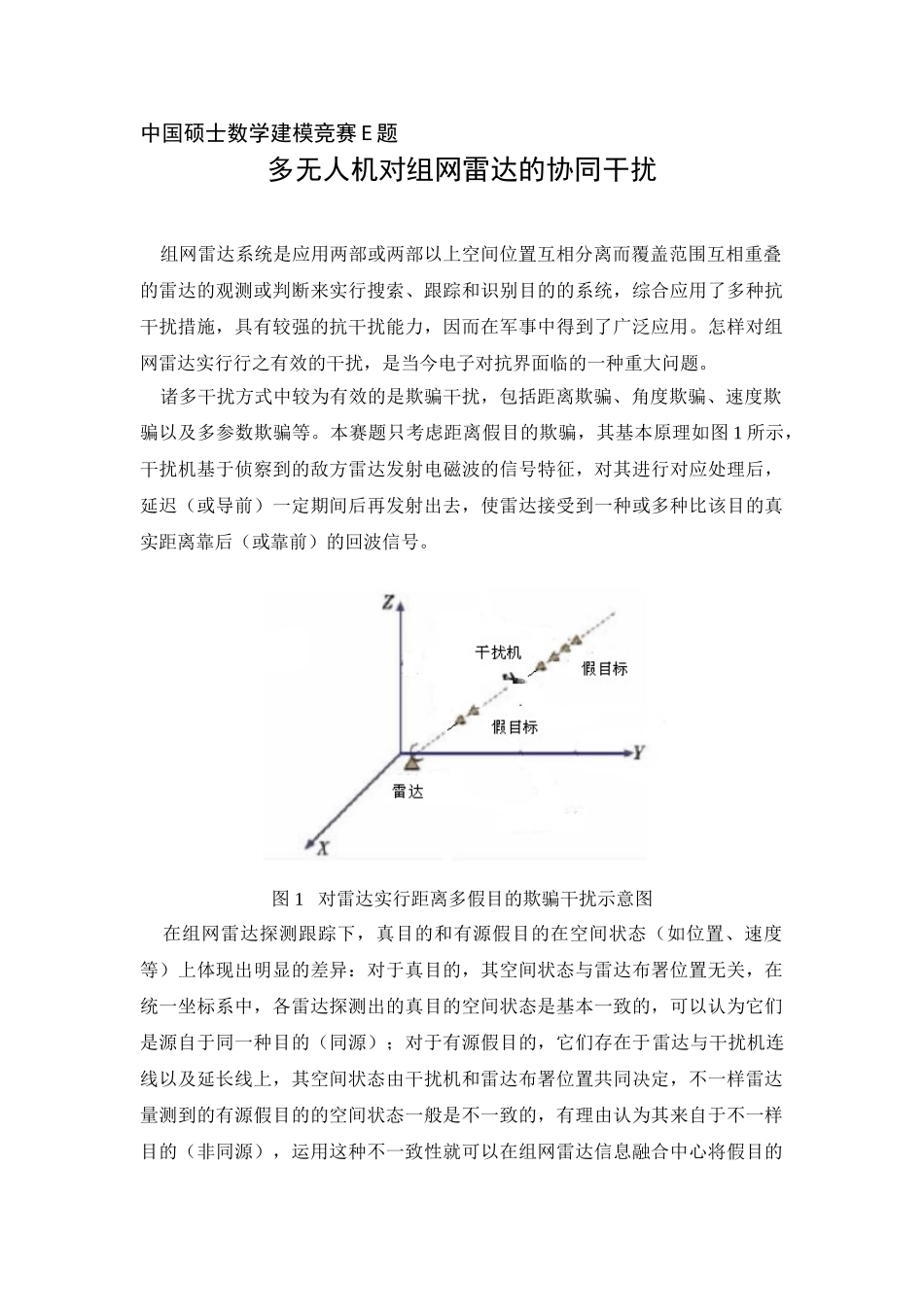
本赛题只考虑距离假目的欺骗,其基本原理如图 1 所示,干扰机基于侦察到的敌方雷达发射电磁波的信号特征,对其进行对应处理后,延迟(或导前)一定期间后再发射出去,使雷达接受到一种或多种比该目的真实距离靠后(或靠前)的回波信号
图 1 对雷达实行距离多假目的欺骗干扰示意图 在组网雷达探测跟踪下,真目的和有源假目的在空间状态(如位置、速度等)上体现出明显的差异:对于真目的,其空间状态与雷达布署位置无关,在统一坐标系中,各雷达探测出的真目的空间状态是基本一致的,可以认为它们是源自于同一种目的(同源);对于有源假目的,它们存在于雷达与干扰机连线以及延长线上,其空间状态由干扰机和雷达布署位置共同决定,不一样雷达量测到的有源假目的的空间状态一般是不一致的,有理由认为其来自于不一样目的(非同源),运用这种不一致性就可以在组网雷达信息融合中心将假目的有效剔除
这种运用真假目的在组网雷达观测下的空间状态差异来进行假目的鉴别的思想简称为“同源检查”,它是组网雷达对真假目的甄别的理论根据
为了能对组网雷达实行有效干扰,目前可运用多架无人机对组网雷达协同干扰
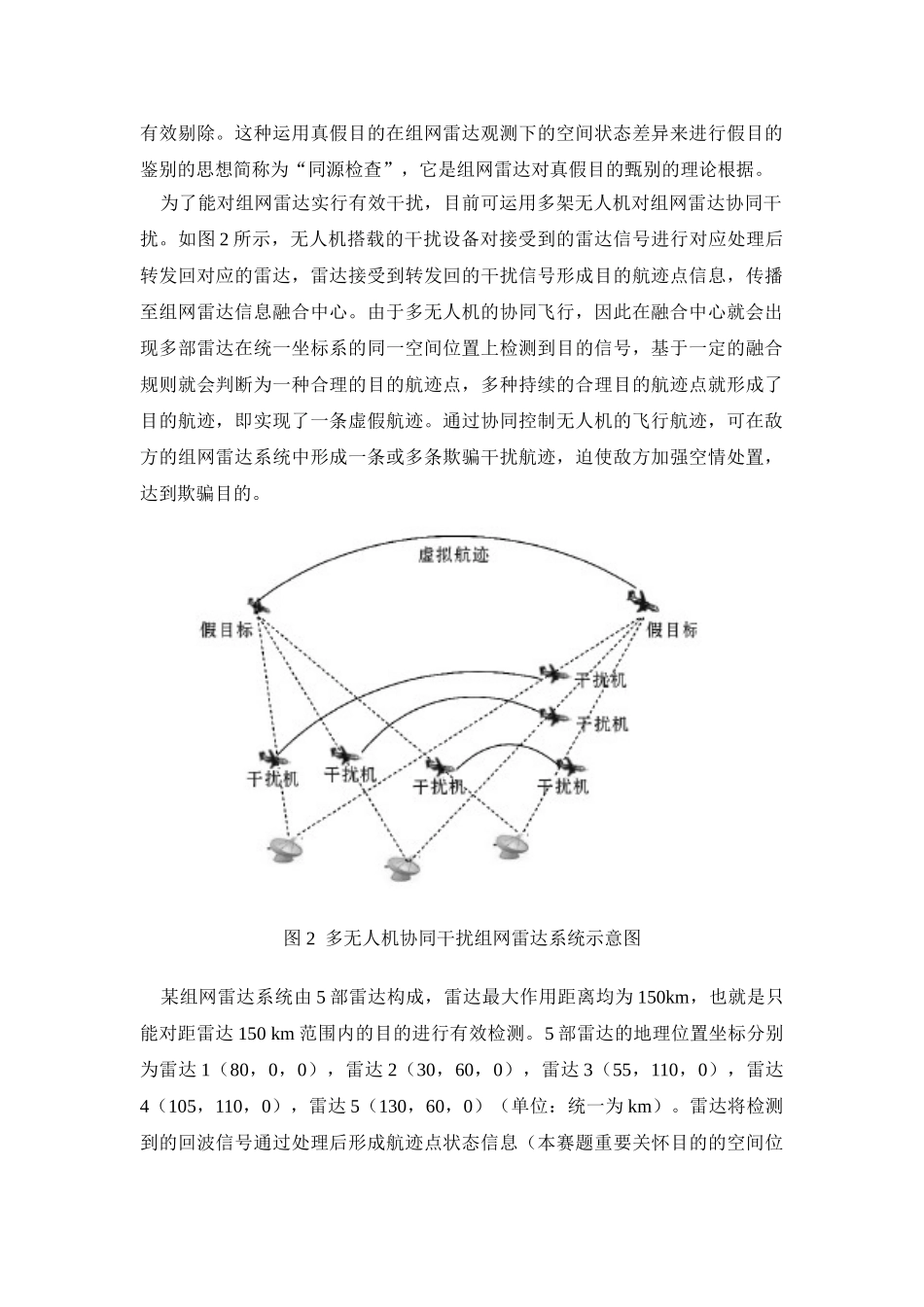
如图 2 所示,无人机搭载的干扰设备对接受到的雷达信号进行对应处理后转发回对应的雷达,雷达接受到转发回的干扰信号形成目的航迹点信息,传播至组网雷达信息融合中心
由于多无人机的协同飞行,因此在融合中心就会出现多部雷达在统一坐标系的同一空间位置上