第七版机械原理复习题第2章 机构的构造分析一、填空题8
两构件之间以线接触所构成的平面运动副称为高副,它产生一种约束,而保留了两个自由度
机构具有确定的相对运动条件是原动件数等于机构的自由度
在平面机构中若引入一种高副将引入1个约束,而引入一种低副将引入2个约束,构件数、约束数与机构自由度的关系是F=3n—2pl-ph
平面运动副的最大概束数为2,最小约束数为1
当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为2,至少为1
计算机机构自由度的目的是判断该机构运动的也许性(能否运动〕及在什么条件下才具有确定的运动,即确定应具有的原动件数
在平面机构中,具有两个约束的运动副是低副,具有一种约束的运动副是高副
三、选择题3
有两个平面机构的自由度都等于1,现用一种带有两铰链的运动构件将它们串成一种平面机构,则其自由度等于 B
(A)0; (B)1; (C)24
原动件的自由度应为B
(A)1; (B)+1; (C)05
基本杆组的自由度应为 C
(A); (B)+1; (C)
在机构中原动件数目B机构自由度时,该机构具有确定的运动
(A)不不小于 (B)等于 (C)不小于
构件运动确定的条件是C
(A)自由度不小于1; (B)自由度不小于零; (C)自由度等于原动件数
七、计算题1
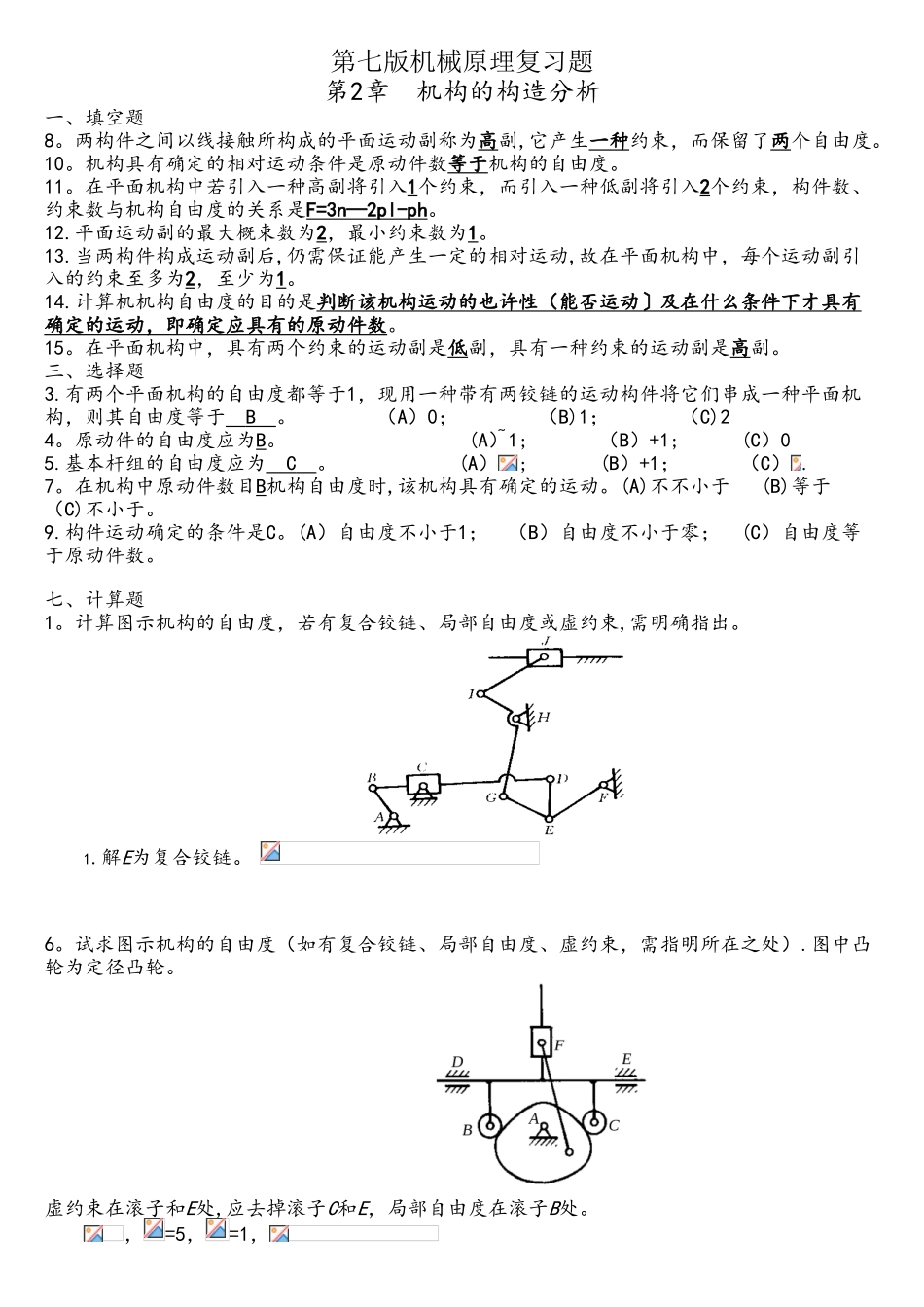
计算图示机构的自由度,若有复合铰链、局部自由度或虚约束,需明确指出
解E为复合铰链
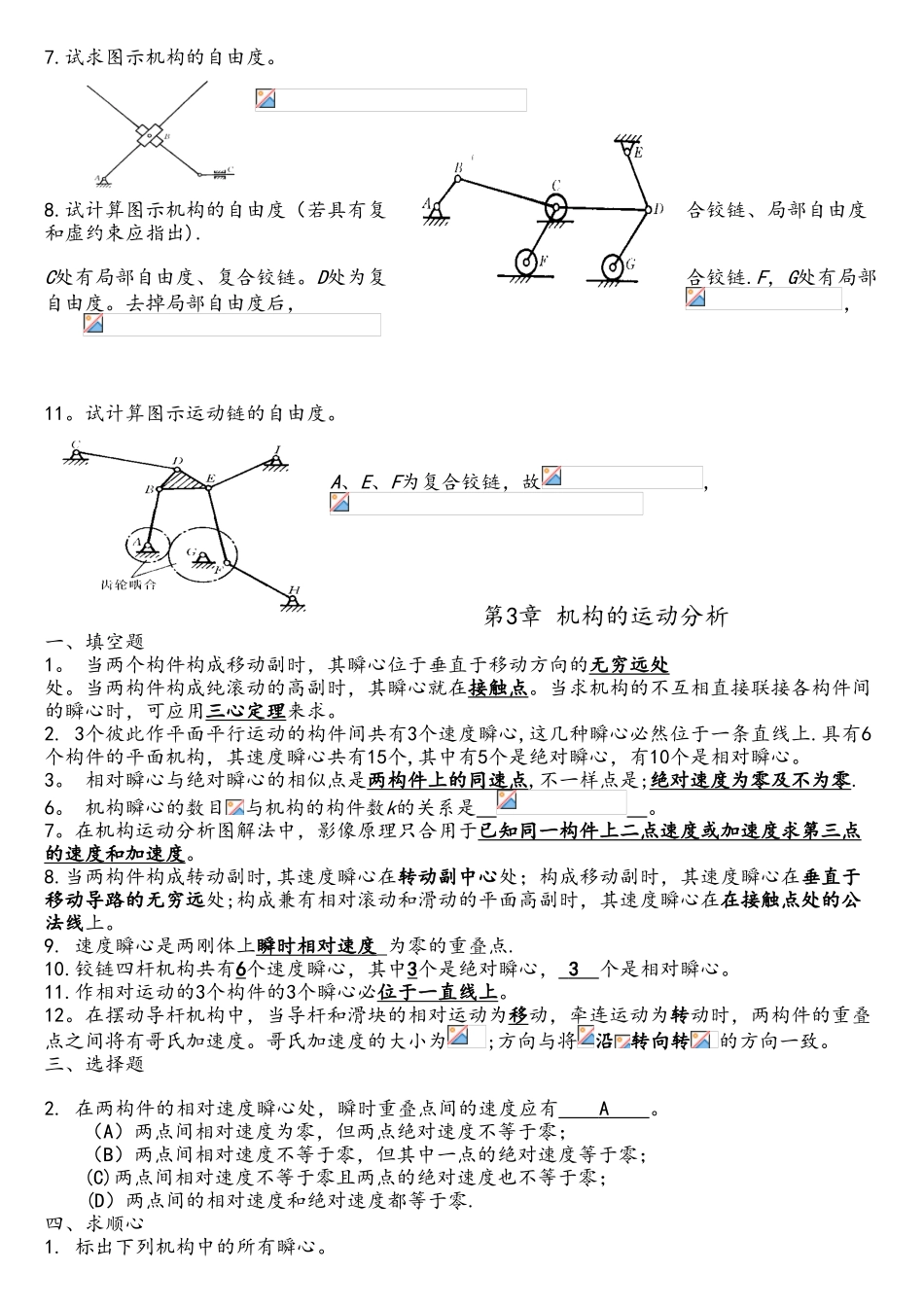
试求图示机构的自由度(如有复合铰链、局部自由度、虚约束,需指明所在之处)
图中凸轮为定径凸轮
虚约束在滚子和E处,应去掉滚子C和E,局部自由度在滚子B处
,=5,=1,7
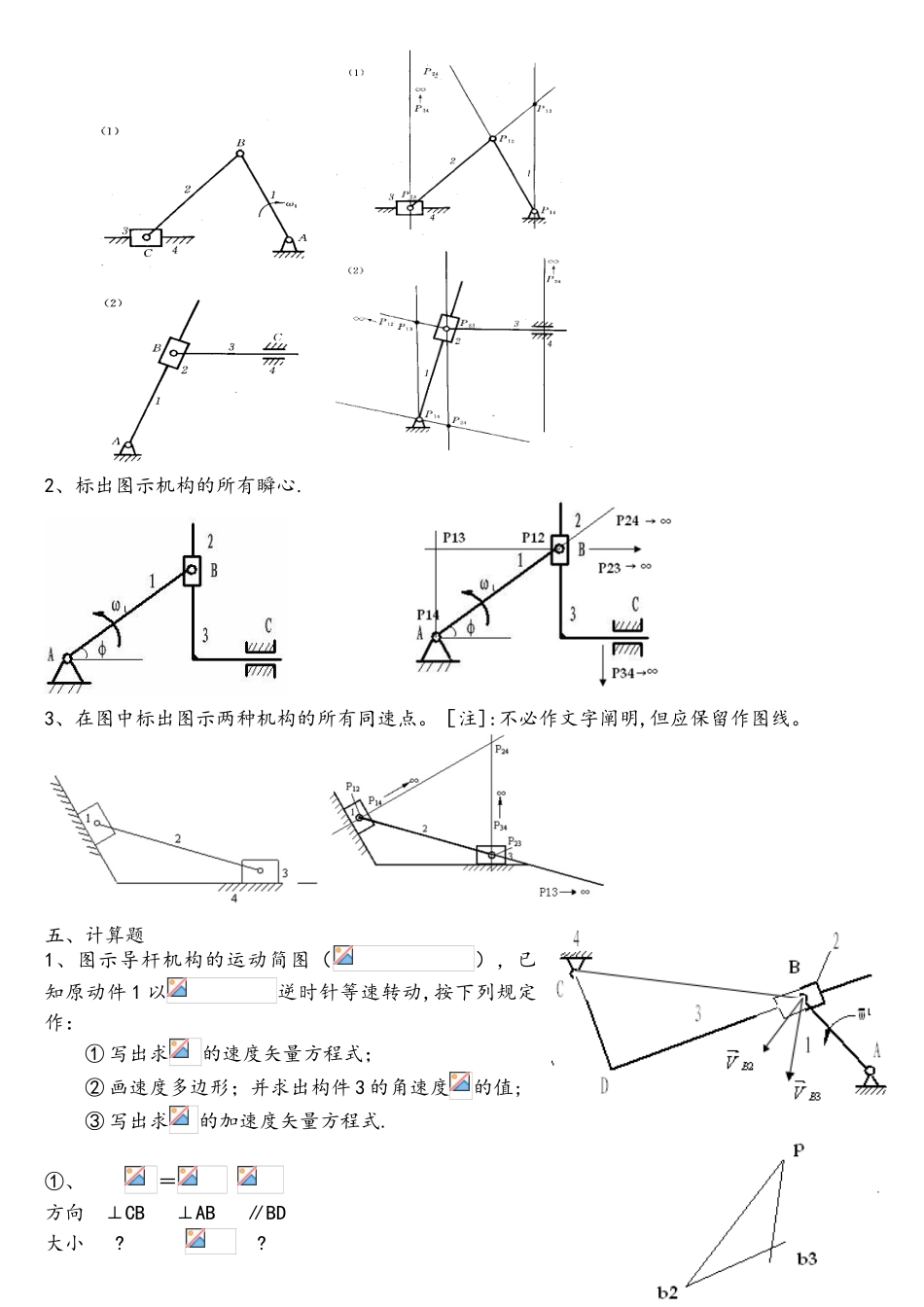
试求图示机构的自由度
试计算图示机构的自由度(若具有复合铰链、局部自由度和虚约束应指出)
C处有局部自由度、复合铰链
D处为复合铰链