机械设计基础 模块 三一、填空1、图示机构中有 1 虚约束
2、图示机构要有确定运动,需要有 1 原动件
3、机构具有确定运动的条件是:原动件数等于机构的自由度数
4、运动副是指能使两构件之间既能保持 直接 接触,而又能产生一定的形式相对运动的连接
5、机器或机构各部分之间应具有 确定 运动
6、运动副接触形式有: 点 、线 、面
题 3-1-1 图 题 3-1-2 图二、判断1、机构都是可动的
(√)2、机器是由机构组合而成的,机构的组合一定就是机器
(×)3、构件可以是一种零件,也可以是几种零件通过刚性连接构成的一种整体
(√)4、按其接触形式,运动副分为点线接触的高副和面接触的低副
(√)5、具有两个自由度和一种约束条件的移动副是平面低副
(×)6、移动副的导路必须与相对移动方向一致
(√)7、机构能具有相对运动的条件是其自由度 F>0
(√)8、速度瞬心法可以用于求解机构的加速度问题
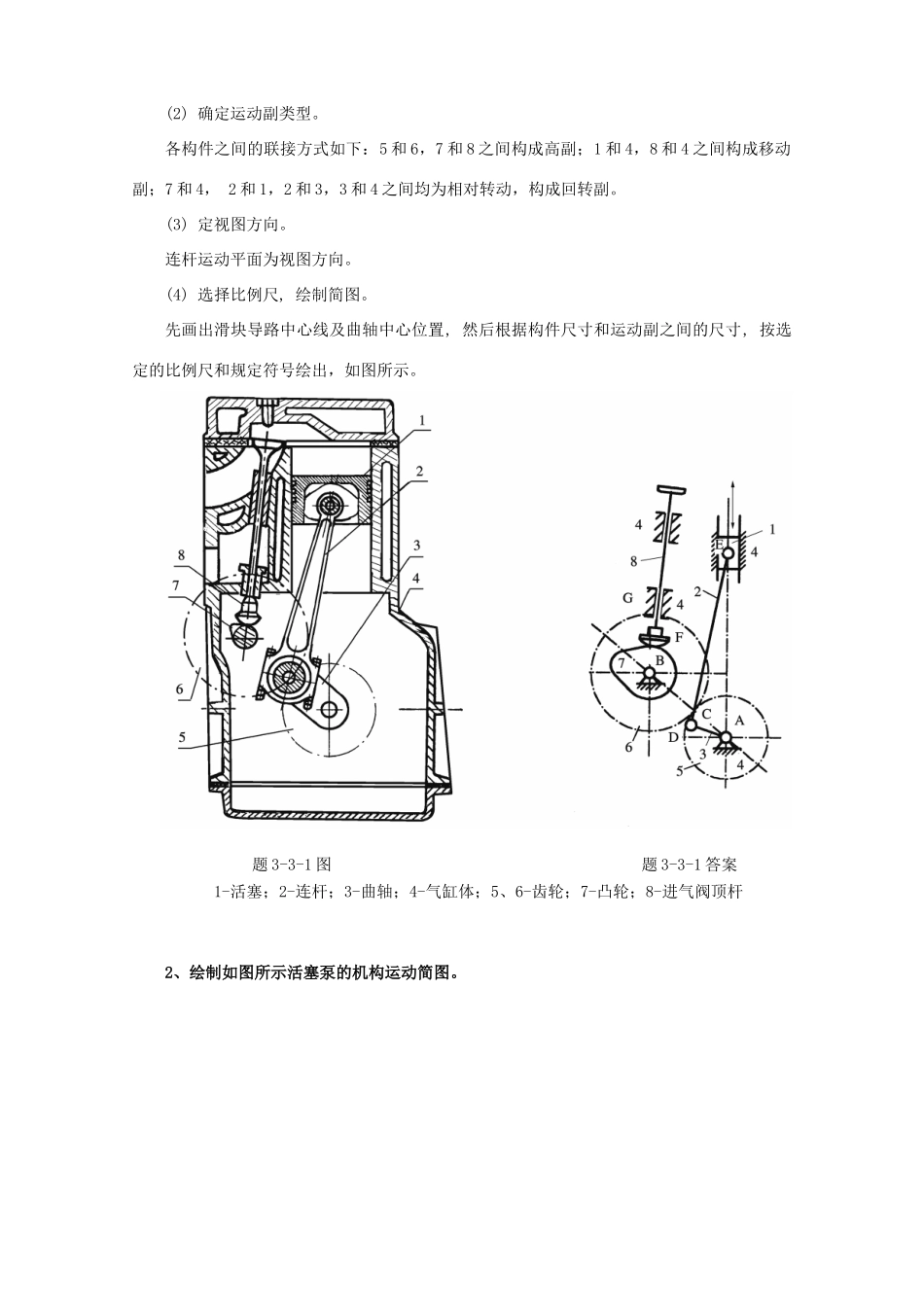
(×)三、计算与分析1、绘制如图所示内燃机的机构运动简图
解 (1) 分析、 确定构件类型
图示的内燃机是由活塞 1、连杆 2、曲轴 3 与气缸体 4 构成的曲柄滑块机构;同曲轴 3 固联的齿轮 5,同凸轮轴 7 固联的齿轮 6 与气缸体 4 构成的齿轮机构;凸轮 7、进气阀顶杆 8 与气缸体 4 构成的凸轮机构(排气阀在图中未画出)共同构成的
气缸体 4 作为机架,是固定件;燃气推进下的活塞 1 是原动件;其他构件都是从动件
(2) 确定运动副类型
各构件之间的联接方式如下:5 和 6,7 和 8 之间构成高副;1 和 4,8 和 4 之间构成移动副;7 和 4, 2 和 1,2 和 3,3 和 4 之间均为相对转动,构成回转副
(3) 定视图方向
连杆运动平面为视图方向
(4) 选择比例尺, 绘制简图
先画出滑块导路中心线及曲轴中心位置, 然后根据构件尺寸和运动副之间的尺寸,