第 1 课 走花样的机器人教学内容:机器人走五边形、六边形等图形的参数设置
教学目标:1、学生理解程序的循环结构和顺序结构
2、学会设置机器人走各种正边图形的参数教学重点:1、训练程序的编程
2、学会设置各种正边图形的参数
教学难点:机器人转过角度与速度和角度有关,学生如何进行调整
教学准备:学生机器人编程软件
教学过程:一、导入:老师:前面我们的小机器人已经能走正方形了, 还记得是怎么实现的吗
打开保存的程序, 回顾一下
学生:进行发言
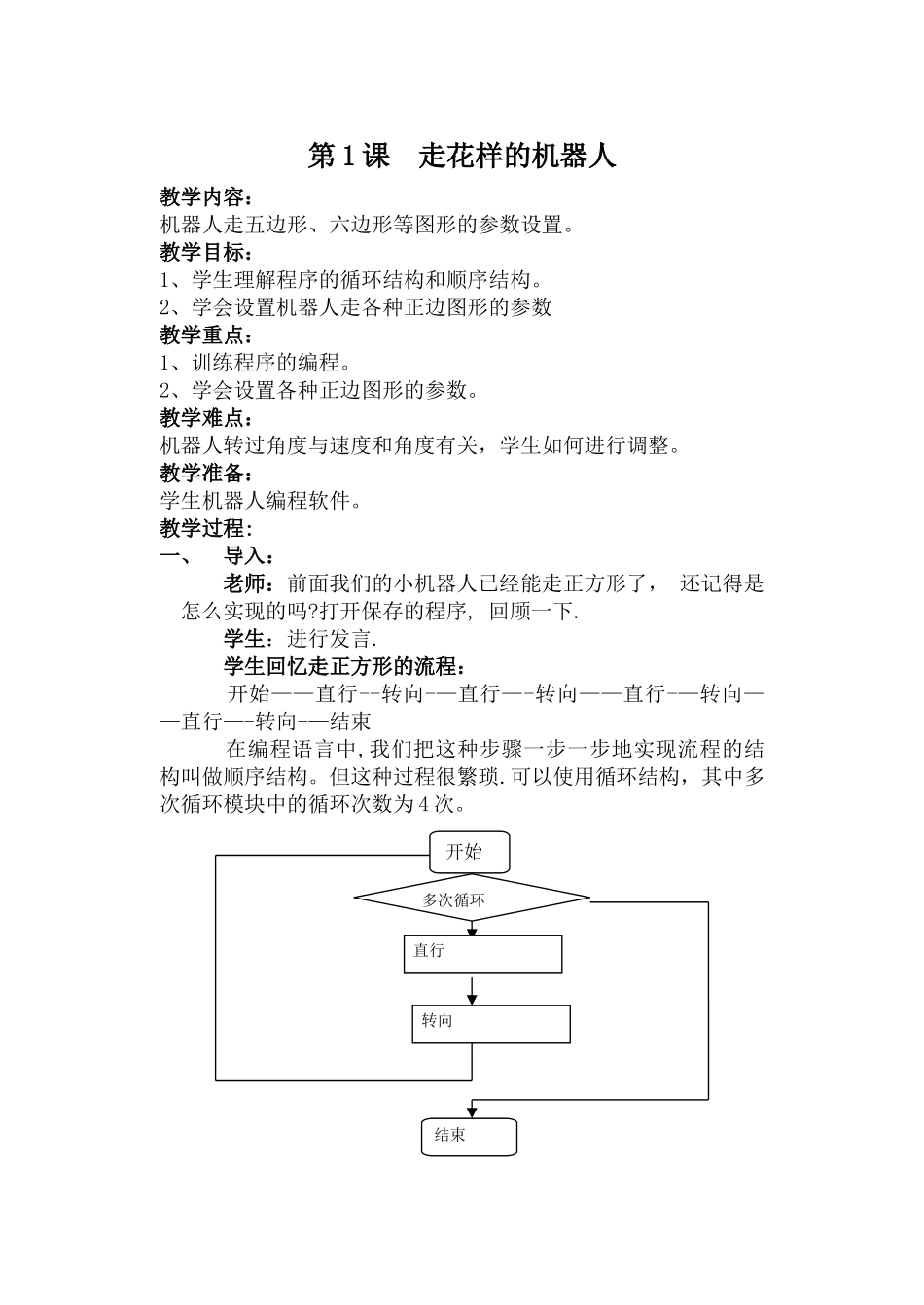
学生回忆走正方形的流程: 开始——直行--转向-—直行—-转向——直行-—转向——直行—-转向-—结束在编程语言中,我们把这种步骤一步一步地实现流程的结构叫做顺序结构
但这种过程很繁琐
可以使用循环结构,其中多次循环模块中的循环次数为 4 次
转向结束多次循环直行开始2、在程序编制中,把多个相同的步骤用一个代表循环的模块表示,我们把这样的结构叫做循环结构
循环结构,可以帮助我们简化程序, 让程序看起来更简洁
一、能走五边形的机器人1、老师演示将程序设置机器人完成五边形的参数
我们对“直行”和“转向" 两个模块设定了“值”:直行:速度 5,时间 3转向:速度 8,角度 90机器人行走的快慢、远近,与电机转速的大小和运动时间的长短有关系
学生:调整直行模块中速度和时间的值,在仿真环境中运行并观察变化
试一试1、改变直行模块的“值", 模拟运行,观察并记录结果
(1)、速度不变,改变时间;(2)、时间不变,改变速度
老师引导学生回答:(1)、原来可以通过“速度” 和“时间"的值,来影响我行走的速度和远近
(2)、机器人转过的角度,与它转动的速度和转弯的角度有关
调整转向模块中的速度和角度值,在仿真环境中运行并观察变化
改变转向模块的“值”,模拟运行,观察并记录结果
(1)速度不变,改变角度;(2)角度不变,改变速度
学生思考:速度会影响机器人