科技大学电子信息学院 实 验 报 告实验课程:计算机控制技术实验名称:PID 控制改良算法的 MATLAB 仿真 学号:1345733203:胡文千班级:13457332完成日期: 2024 年 11 月 16 日评定成绩指导老师宋英磊一、 实验目的〔1〕对 PID 数字控制的改良算法用 MATLAB 进展仿真
二、 实验容1、积分别离 PID 控制算法在普通 PID 控制中,积分的目的是为了消除误差提高精度,但在过程的启动、完毕或大幅度增减设定是,短时间系统输出有很大偏差,会造成 PID 运算的积分积累,致使控制量超过执行机构可能允许的最大动作围对应的极限控制量,引起系统较大的超调,甚至引起系统较大的振荡,这在生产中是绝对不允许的
积分别离控制根本思路是,当被控量与设定值偏差较大时,取消积分作用,以免由于积分作用使系统稳定性降低,超调量增大;当被控量接近给定值时,引入积分控制,以便消除静差,提高控制精度
其具体实现步骤是:1) 根据实际情况,人为设定阈值 ε>0;2) 当 时,采纳 PD 控制,可防止产生过大的超调,又使系统有较快的响应;3) 当时,采纳 PID 控制,以保证系统的控制精度
积分别离算法可表示为:式中,T 为采样时间,β 为积分项的开关系数,仿真 1 设备控对象为一个延迟对象,采样周期为 20s,延迟时间为 4 个采样 周 期 , 即 80s
输 入 信 号 r(k)=40 , 控 制 器 输 出 限 制 在 [-110,110]
被控对象离散化为仿真方法:仿真程序:ex9_1
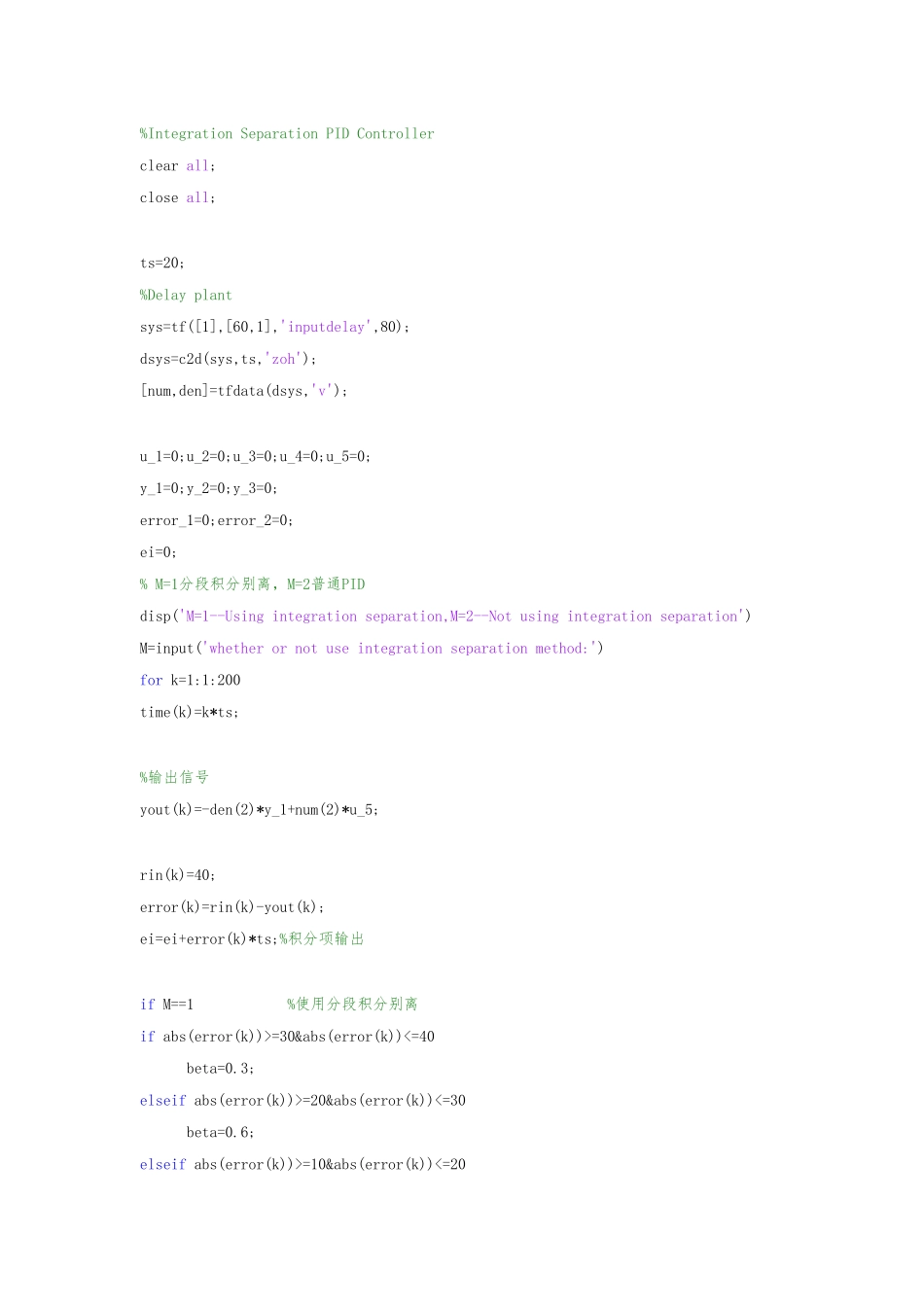
当 M=1 时采纳分段积分别离法,M=2 时采纳普通 PID控制
%Integration Separation PID Controllerclear all;close all;ts=20;%Delay plantsys=tf([1],[60,1],'inp