第十一章:简单机械第一节:杠杆1、 定义:在 的作用下绕着转动的叫杠杆
[说明]:①杠杆可可,形状
② 有些情况下,可将杠杆实际转一下,来帮助确定支点
如:鱼杆、铁锹
2、 五要素——组成杠杆示意图
① 支点:杠杆绕着转动的点
用字母 O 表示
② 动力:使杠杆转动的力
用字母 F1 表示
③ 阻力:阻碍杠杆转动的力
用字母 F2 表示
④ 动力臂:从到的距离
用字母 L1表示
⑤ 阻力臂:从到的距离
用字母了 L2表示
[说明]1、 动力、阻力都是杠杆的受力,所以作用点在杠杆上
2、动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反
3、动力臂、阻力臂不一定在杠杆上
4、力臂是指“点到线”的距离,即支点到力的作用线的距离,而不是“点到点”的距离
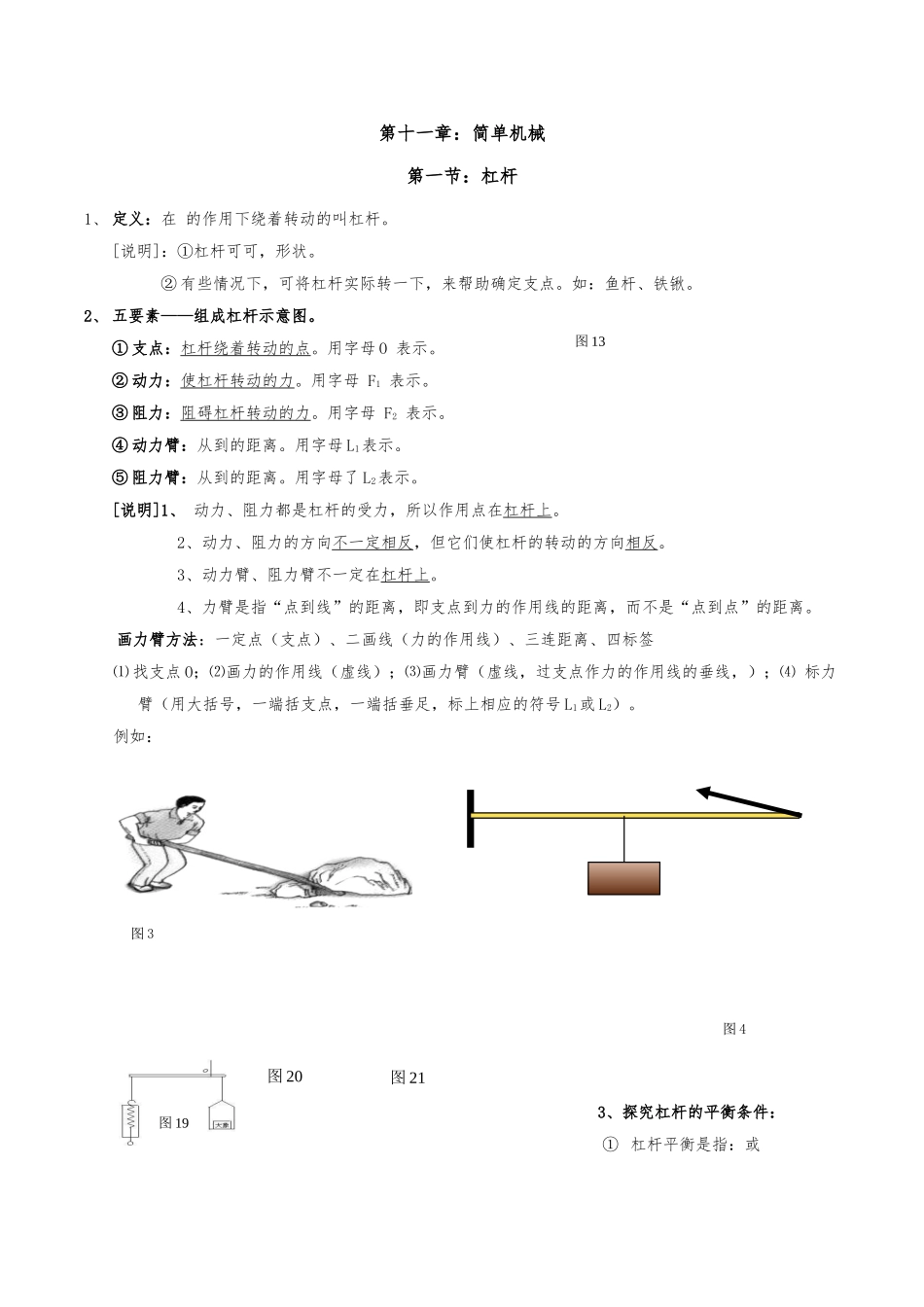
画力臂方法:一定点(支点)、二画线(力的作用线)、三连距离、四标签⑴ 找支点 O;⑵画力的作用线(虚线);⑶画力臂(虚线,过支点作力的作用线的垂线,);⑷ 标力 臂(用大括号,一端括支点,一端括垂足,标上相应的符号 L1或 L2)
例如:3、探究杠杆的平衡条件:① 杠杆平衡是指:或图 13图 3图 4图 20图 21图 19② 选择杠杆中间为支点的目的(或不挂钩码时使杠杆在水平位置平衡的目的):
③ 实验前:应调节杠杆两端的,若杠杆右端下沉,杠杆两侧的平衡螺母向调(即左高左调),使杠杆在位置平衡
这样做的目的是:
④ 多次实验的目的:⑤ 当弹簧测力计的方向由竖直倾斜时,杠杆仍然平衡,示数变,原因:
⑥ 当把左侧的钩码拿掉
杠杆将处于竖直位置,在右侧施加一个力,却发现无论用多大的力都不能将杠杆拉到水平位置平衡,其原因:水平位置时动力臂为零,杠杆无法平衡⑦ 实验结论:杠杆的平衡条件(或杠杆原理)是:;写成公式也可写成:
其含义是:假如动力臂是阻力臂的几倍,那么动力就是阻力的
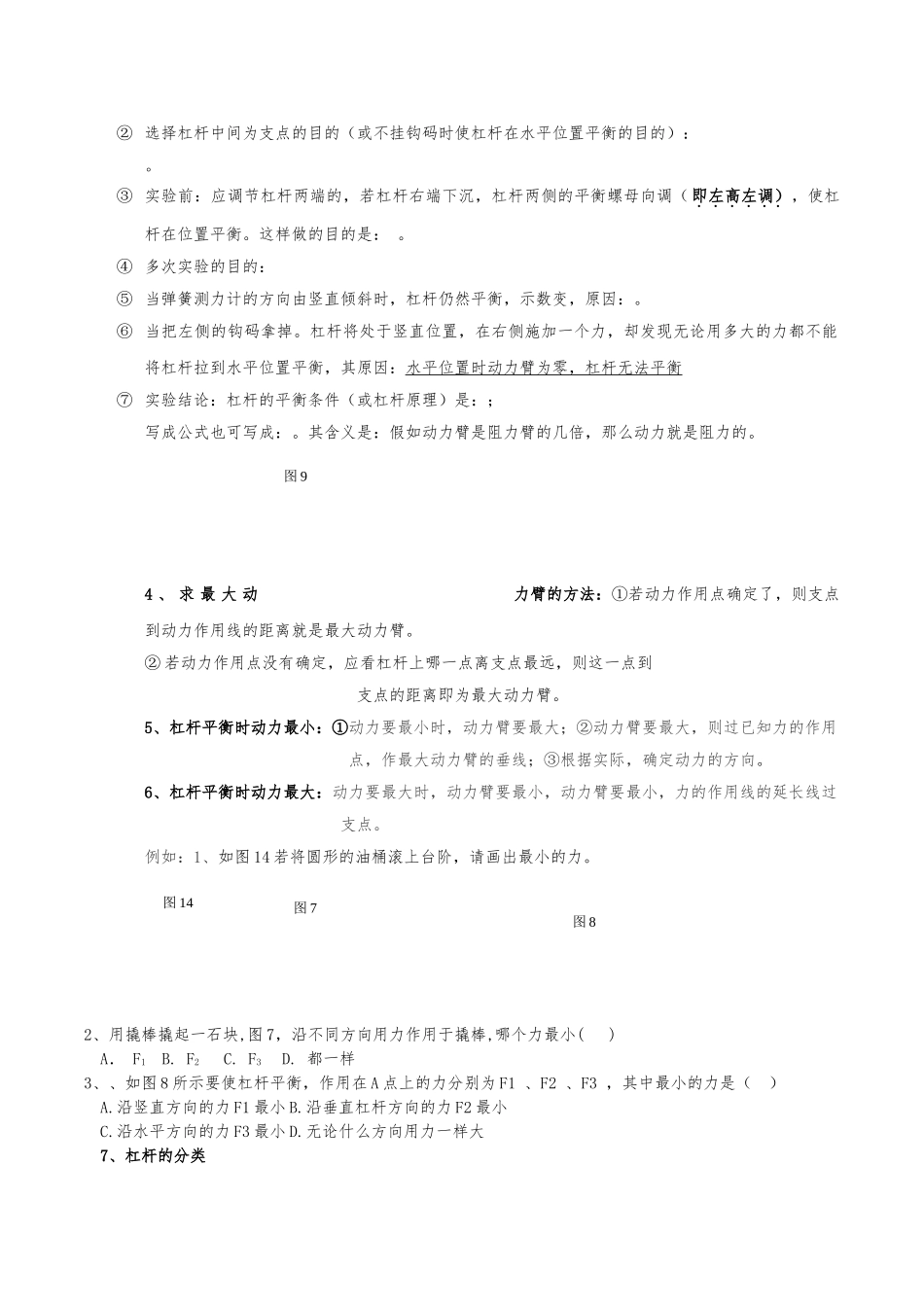
4 、 求 最 大 动力臂的方法:①若动力作