已知一物体作自由落体运动,对其高度进行了 20 次测量,测量值如下表:时间[s]1234567咼度[km]1
7598时间[s]891011121314咼度[km]1
0399时间[s]151617181920咼度[km]0
0399设高度的测量误差是均值为 0、方差为 1的高斯白噪声随机序列,该物体的初始高度 h 和速度V0Eh1900mh「10也是高斯分布的随机变量,0 =,P=var0=
试求该物体高EV010m/s0V002和速度随时间变化的最优估计
(g 二 9
80m/s2)解:_h(k)—1
令 X(k)二门、t=1R(k)=1Q(k)=0_v(k)_根据离散时间卡尔曼滤波公式,则有:X(k+1)=©(k+1,k)X(k)+U(k)Y(k+1)=H(k+1)X(k+1)+V(k+1)100P(010)二 var[X(0)]二 P 二0步预测:文(k+11k)=©(k+1,k)文(kIk)+U(k)P(k+11k)=©(k+1,k)P(kIk)©T(k+1,k)滤波增益:K(k+1)=P(k+11k)HT(k+1)[H(k+1)P(k+11k)HT(k+1)+R(k+1)]-1AAA滤波计算:X(k+11k+1)=X(k+11k)+K(k+1)[Y(k+1)-H(k+1)X(k+11k)]P(k+11k+1)=[I-K(k+1)H(k+1)]P(k+11k)2
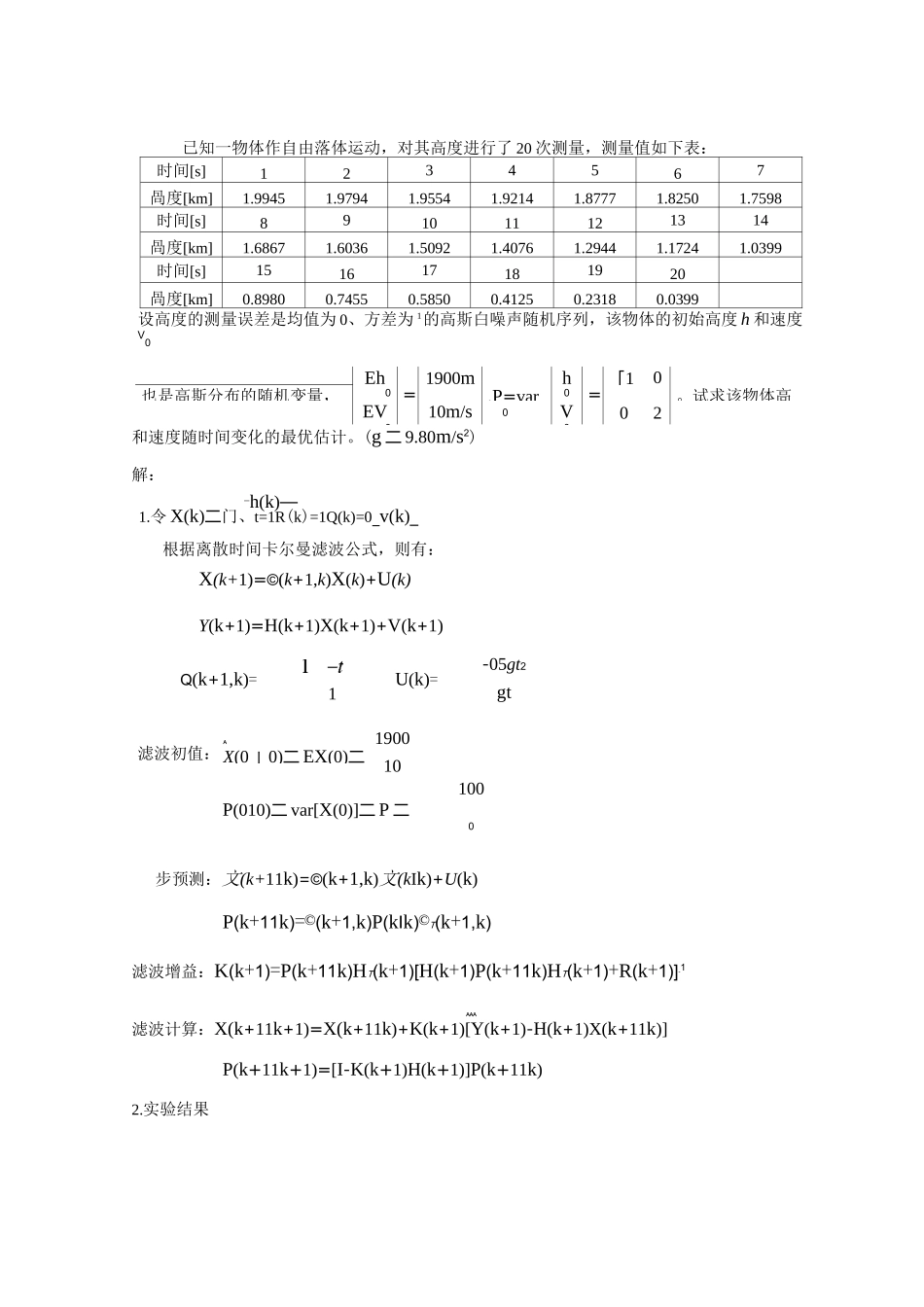
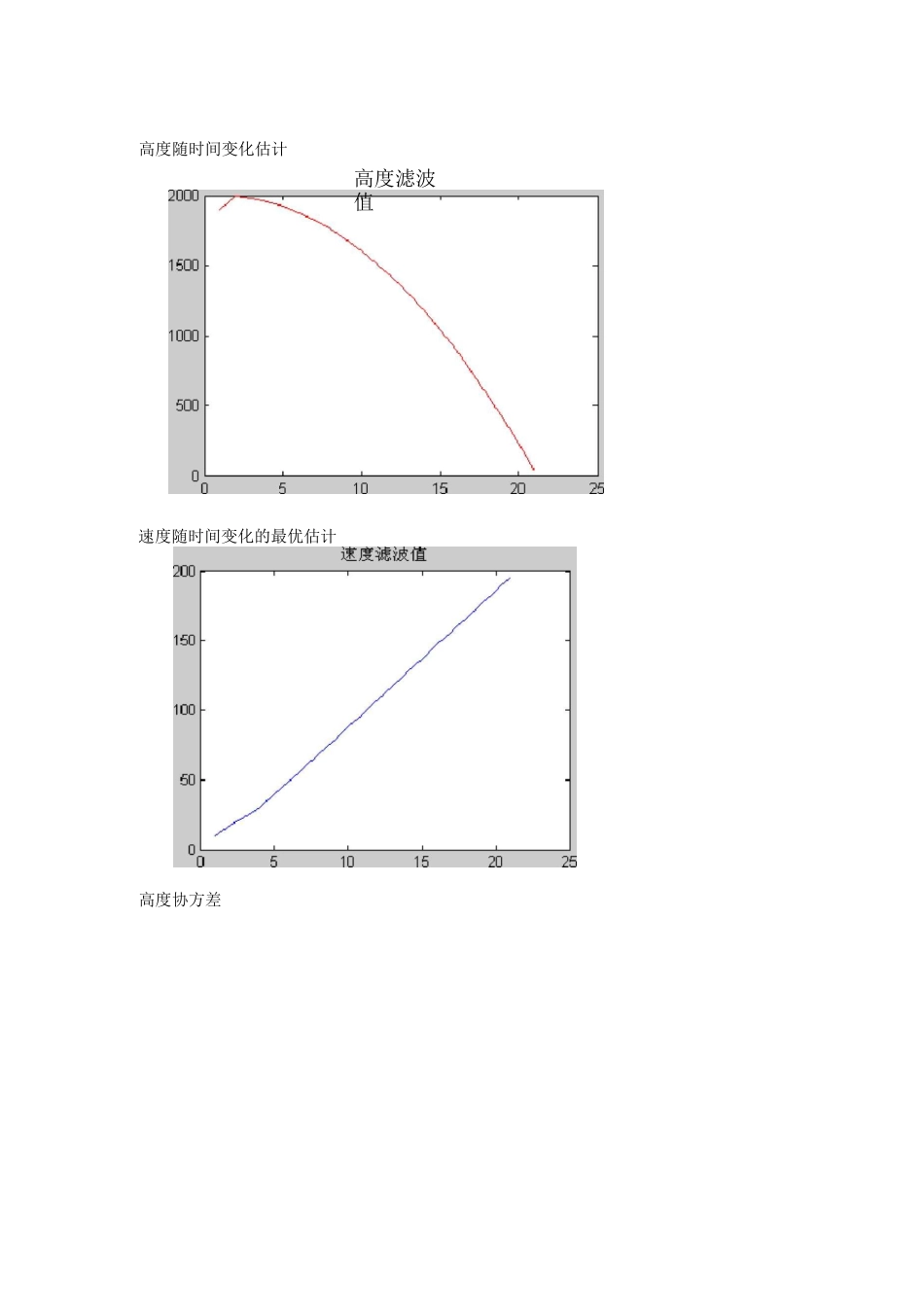
实验结果Q(k+1,k)=U(k)=-05gt2gt滤波初值:AX(0 丨 0)二 EX(0)二1900101高度随时间变化估计高度滤波值速度随时间变化的最优估计高度协方差速度协方差从以上的结果,可以得到