交流伺服电机的工作原理伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度
伺服电机的精度决定于编码器的精度(线数)
伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降什么是步进电机
步进电机是一种将电脉冲转化为角位移的执行机构
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的
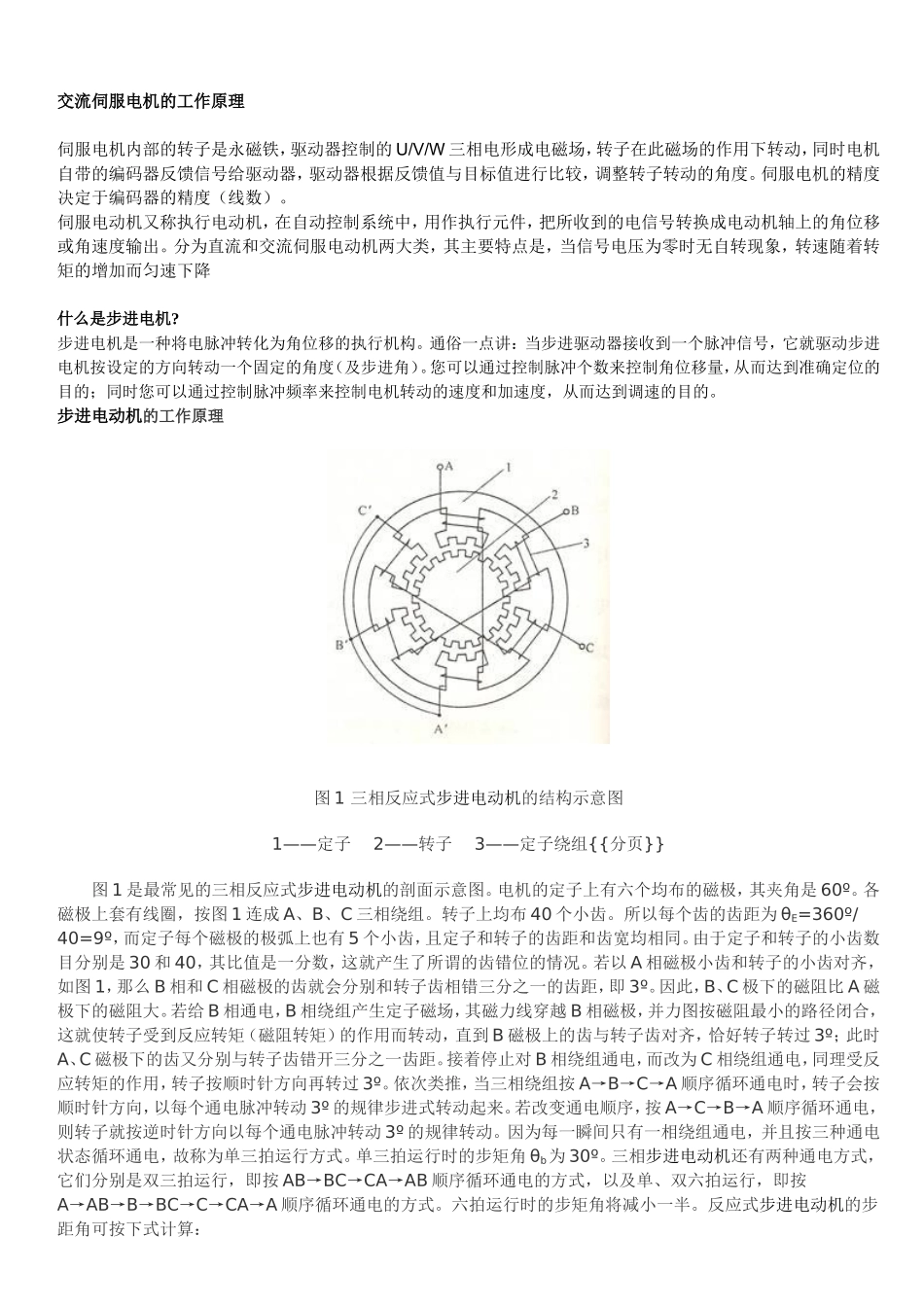
步进电动机的工作原理图1三相反应式步进电动机的结构示意图1——定子2——转子3——定子绕组{{分页}}图1是最常见的三相反应式步进电动机的剖面示意图
电机的定子上有六个均布的磁极,其夹角是60º
各磁极上套有线圈,按图1连成A、B、C三相绕组
转子上均布40个小齿
所以每个齿的齿距为θE=360º/40=9º,而定子每个磁极的极弧上也有5个小齿,且定子和转子的齿距和齿宽均相同
由于定子和转子的小齿数目分别是30和40,其比值是一分数,这就产生了所谓的齿错位的情况
若以A相磁极小齿和转子的小齿对齐,如图1,那么B相和C相磁极的齿就会分别和转子齿相错三分之一的齿距,即3º
因此,B、C极下的磁阻比A磁极下的磁阻大
若给B相通电,B相绕组产生定子磁场,其磁力线穿越B相磁极,并力图按磁阻最小的路径闭合,这就使转子受到反应转矩(磁阻转矩)的作用而转动,直到B磁极上的齿与转子齿对齐,恰好转子转过3º;此时A、C磁极下的齿又分别与转子