SIASUN AGV电气维护手册沈阳新松机器人自动化股份有限公司目录第一章简介 2第二章电气组成及功能错误
1VCU3 (车体控制器)32
2MCU50(运动控制器)32
3 伺服驱动器 42
4 前后保险杠 52
5 电池组 6第三章电气维护 63
1AGV 电源的维护 63
2AGV 控制器的维修 7
3 伺服系统维护说明 83
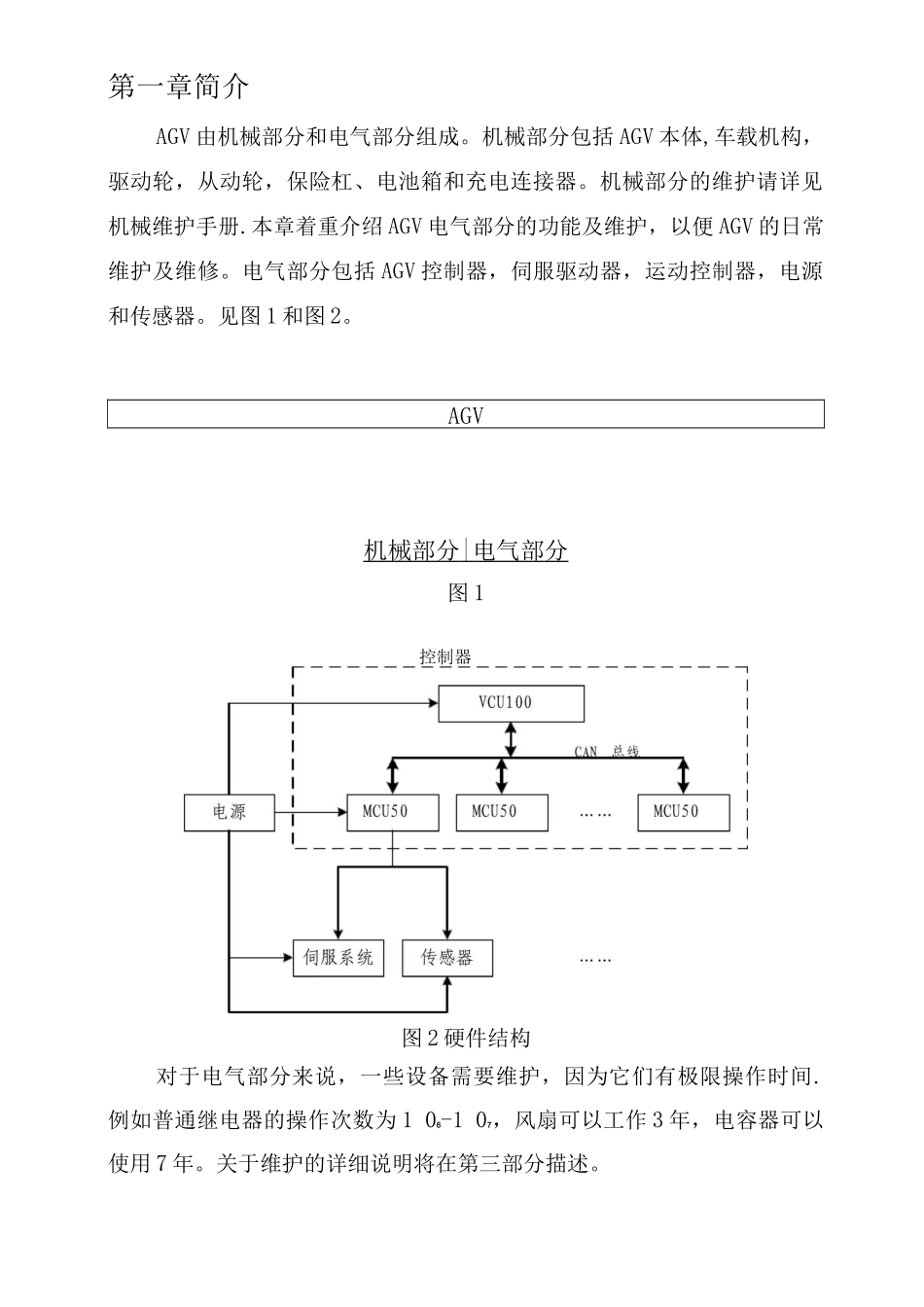
4 电池的维护 9第一章简介AGV 由机械部分和电气部分组成
机械部分包括 AGV 本体,车载机构,驱动轮,从动轮,保险杠、电池箱和充电连接器
机械部分的维护请详见机械维护手册
本章着重介绍 AGV 电气部分的功能及维护,以便 AGV 的日常维护及维修
电气部分包括 AGV 控制器,伺服驱动器,运动控制器,电源和传感器
见图 1 和图 2
AGV机械部分 | 电气部分 图 1控制器图 2 硬件结构对于电气部分来说,一些设备需要维护,因为它们有极限操作时间
例如普通继电器的操作次数为 1 06-1 07,风扇可以工作 3 年,电容器可以使用 7 年
关于维护的详细说明将在第三部分描述
第二章电气组成及功能电气控制箱里安装有 AGV 的控制器、伺服驱动器及各种控制用电气件,是 AGV 的信息处理及控制中心
本章通过对 AGV 上主要的电气件的介绍,可以方便用户在 AGV 的使用中对其电气性能的了解和对故障的分析
1 VCU3 (车体控制器)VCU 3 (vehicle control 是 1^^ 主控制单元
VCU3 内 部 有 VGA 和 TFFIO/IOOBASE —T 快 速 以 太 网(FastEthernet 芯片
可连接 LCD 显示屏作为 AGV 的显示终端,进行人机交互和状态显示,网连接无线 SA 电台可以与上位机进行无线以太网联机,实现对 AGV 的调度
在 VCU3 内部还有使用 104 总线 CAN