北航惯性导航大作业(25 页)Good is good, but better carries it
精益求精,善益求善
惯性导航基础课程大作业报告(一)光纤陀螺误差建模与分析班级:111514姓名:学号2025 年 5 月 26 日一
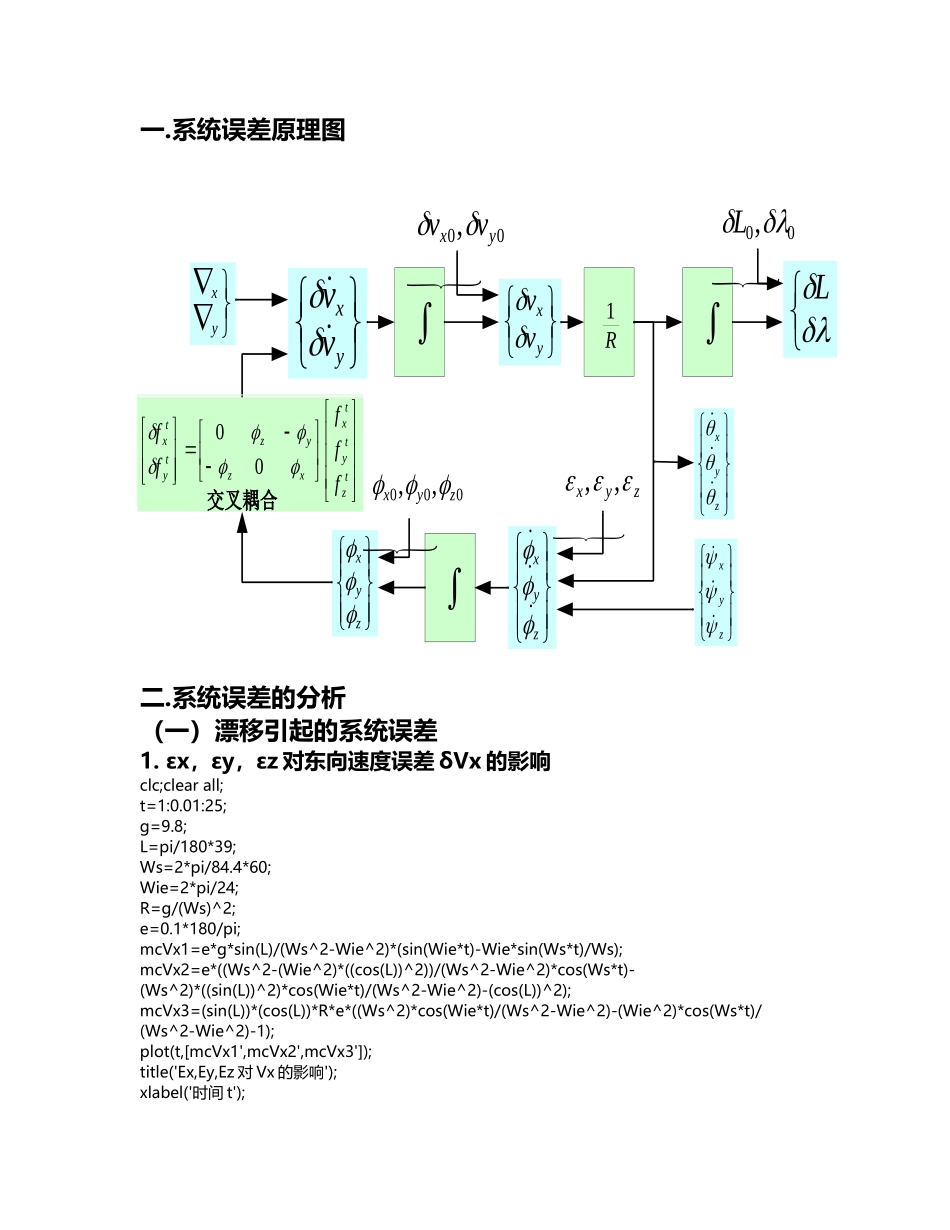
系统误差原理图二
系统误差的分析(一)漂移引起的系统误差1
εx,εy,εz 对东向速度误差 δVx 的影响clc;clear all;t=1:0
01:25;g=9
8;L=pi/180*39;Ws=2*pi/84
4*60;Wie=2*pi/24;R=g/(Ws)^2;e=0
1*180/pi;mcVx1=e*g*sin(L)/(Ws^2-Wie^2)*(sin(Wie*t)-Wie*sin(Ws*t)/Ws);mcVx2=e*((Ws^2-(Wie^2)*((cos(L))^2))/(Ws^2-Wie^2)*cos(Ws*t)-(Ws^2)*((sin(L))^2)*cos(Wie*t)/(Ws^2-Wie^2)-(cos(L))^2);mcVx3=(sin(L))*(cos(L))*R*e*((Ws^2)*cos(Wie*t)/(Ws^2-Wie^2)-(Wie^2)*cos(Ws*t)/(Ws^2-Wie^2)-1);plot(t,[mcVx1',mcVx2',mcVx3']);title('Ex,Ey,Ez 对 Vx 的影响');xlabel('时间 t');yxyxvvyxvvR1Lzyxzyxzyx00,L00,yxvv 000,,zyxzyx,,zyx