1 过程控制中常见得被控量:温度压力液位成分物性2 影响被控对象动态特性结构性质:容量系数表现为惯性,阻力表现为自平衡能力,传递延迟表现为迟延时间特性3 自平衡能力:对象受到干扰,平衡状态被破坏后,不需要任何外加调节,依靠对象自身能力经过一段时间重新恢复平衡得能力
拥有此能力得叫有自平衡能力对象4 衡量控制系统品质时域指标:衰减率与衰减比 最大动态偏差与超调量 残余误差 调节时间与振荡频率 积分性能指标:误差积分 绝对误差积分 平方误差积分 时间与绝对误差乘积积分5 PID 调节传递函数形式:G(S)=1/(1+1/TIS+TDs)或 GPID=1/(1+1/Tis+TdS/(Td/Kd*s+1))比例调节特点:调节及时迅速,但为有差控制存在静态偏差,积分调节: a 无差控制:只要有偏差存在控制器就会一直调整直到偏差为 0,b:动作过程慢,积分环节有 90 度相角滞后,增加一个滞后环节使过程变慢,c:积分作用对系统稳定性不利
微分作用:超前调节 减小动态偏差 减小过渡过程时间 不能单独使用6 单回路系统参数整定:理论计算方法:根轨迹法,衰减频率特性法,工程整定方法:临界比例带法 衰减曲线法 经验法 动态参数法 工程整定法:优点:比例带较小,动作很快,被调量波动幅度不会太大,缺点:试验会使较小得系统进入不稳定状态,甚至等幅振荡;对有自平衡系统,不会进入临界状态
衰减曲线法:优:试验方法简单易掌握,无临界比例带法得限制
缺:因外界干扰等缺陷导致难以推断曲线就是否达到期望得衰减过程,很难获得准确得 4:1 或 10:1 衰减过程下得比例带与周期
经验法:瞧曲线调参数方法简单,缺点工作量大动态参数法:优:方法简单省时,得到对象阶跃响应曲线后即能计算出调节器得参数
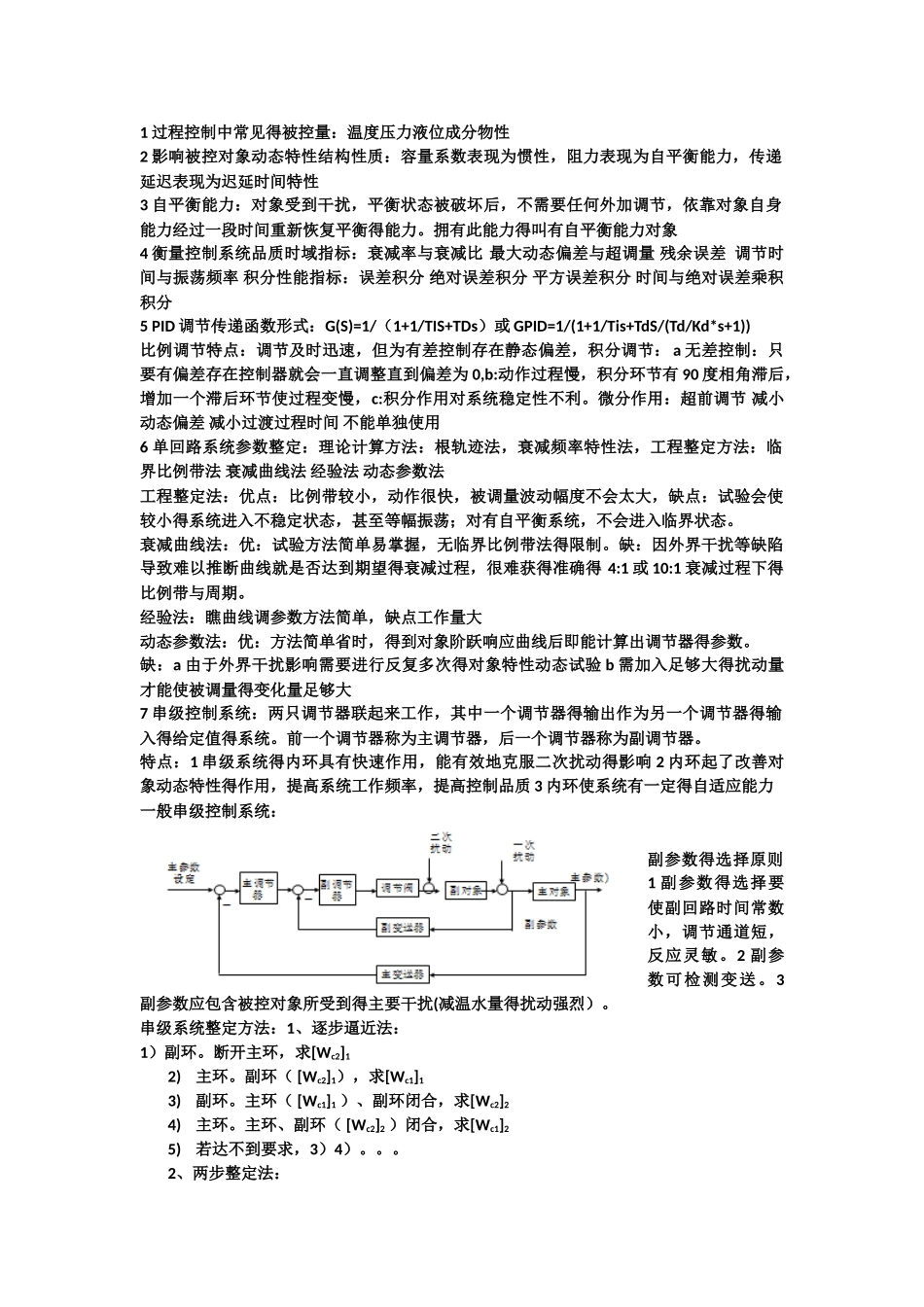
缺:a 由于外界干扰影响需要进行反复多次得对象特性动态试验 b 需加入足够大得扰动量才能使被调量得变化量足够大7 串级控