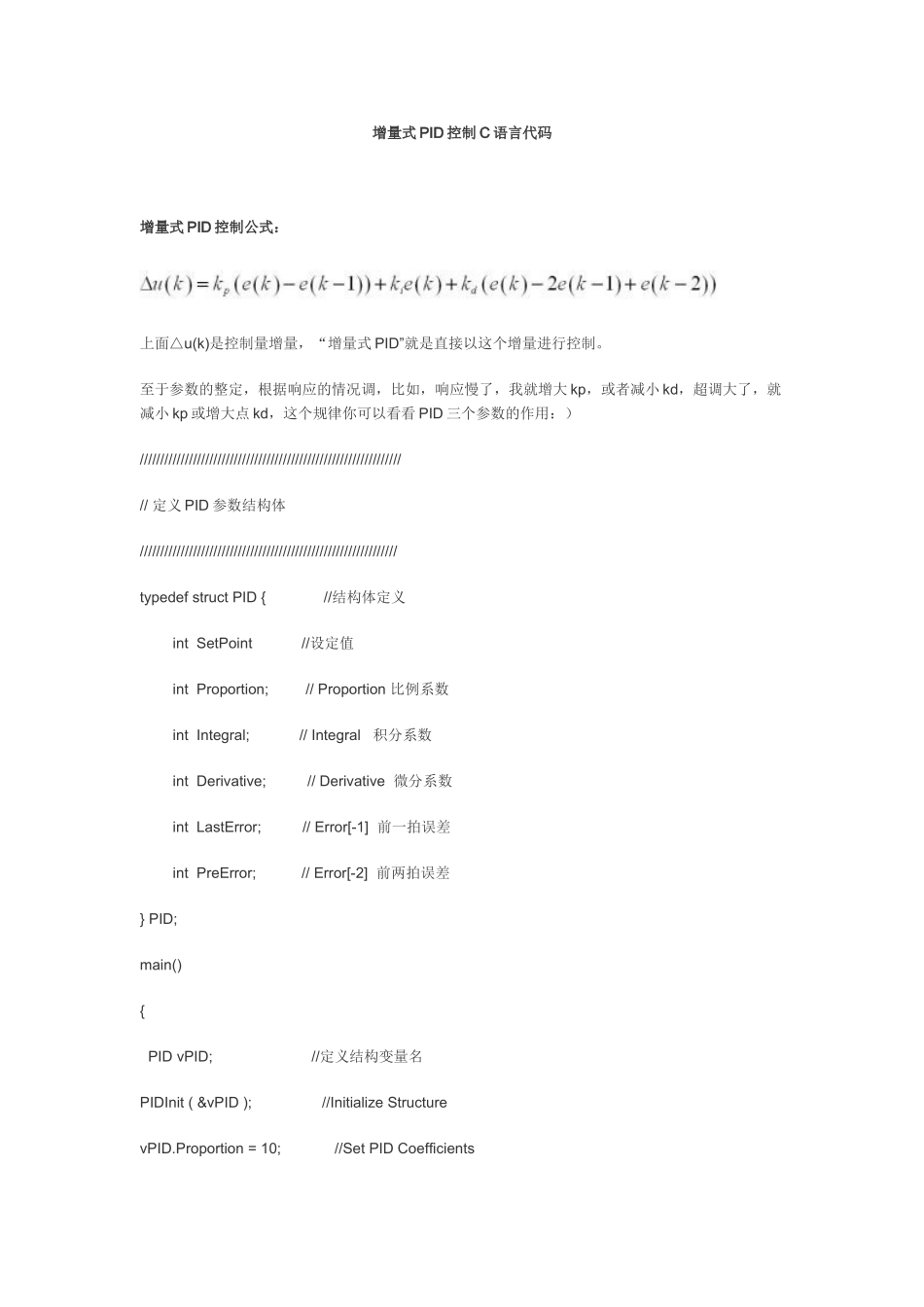
增量式 PID 控制 C 语言代码增量式 PID 控制公式:上面△u(k)是控制量增量,“增量式 PID”就是直接以这个增量进行控制
至于参数的整定,根据响应的情况调,比如,响应慢了,我就增大 kp,或者减小 kd,超调大了,就减小 kp 或增大点 kd,这个规律你可以看看 PID 三个参数的作用:)////////////////////////////////////////////////////////////////// 定义 PID 参数结构体///////////////////////////////////////////////////////////////typedef struct PID { //结构体定义 int SetPoint //设定值 int Proportion; // Proportion 比例系数 int Integral; // Integral 积分系数 int Derivative; // Derivative 微分系数 int LastError; // Error[-1] 前一拍误差 int PreError; // Error[-2] 前两拍误差} PID;main(){ PID vPID; //定义结构变量名PIDInit ( &vPID ); //Initialize StructurevPID
Proportion = 10; //Set PID Coefficients vPID
Integral = 10; // Set PID Integral vPID
Derivative = 10; // Set PID Derivative vPID
SetPoint = //根据实际情况设定 while(1){ Verror=Measure(); //得到 AD 的输出值 Error =vPID
SetPoin