习题11、1 简述工业机器人得定义
1 98 7联合国标准化组织(IS O)采纳得美国机器人协会得“机器人”定义:“工业机器人就是一种可以反复编程与多功能得,用来搬运材料、零件、工具得操作机;或者为了执行不同得任务而具有可改变得与可编程动作得专门系统”
1、2 机器人应具有哪三大特征
机器人具有三大特征:1、拟人功能ﻫ2、可编程3、通用性1、3 什么叫示教再现机器人
由人操纵机器人执行任务,并记录下这些动作,机器人进行作业时根据记录下得信息重复执行同样得动作
1、4 并联机器人特点
并联机器人特点:A 无累积误差,精度较高;b 驱动装置可置于定平台上或接近定平台得位置,这样运动部分重 量轻,速度高,动态响应好;c 结构紧凑,刚度高,承载能力大;d 完全对称得并联机构具有较好得各向同性;e 工作空间较小,控制复杂;1、5 工业机器人按机械系统得基本结构分类
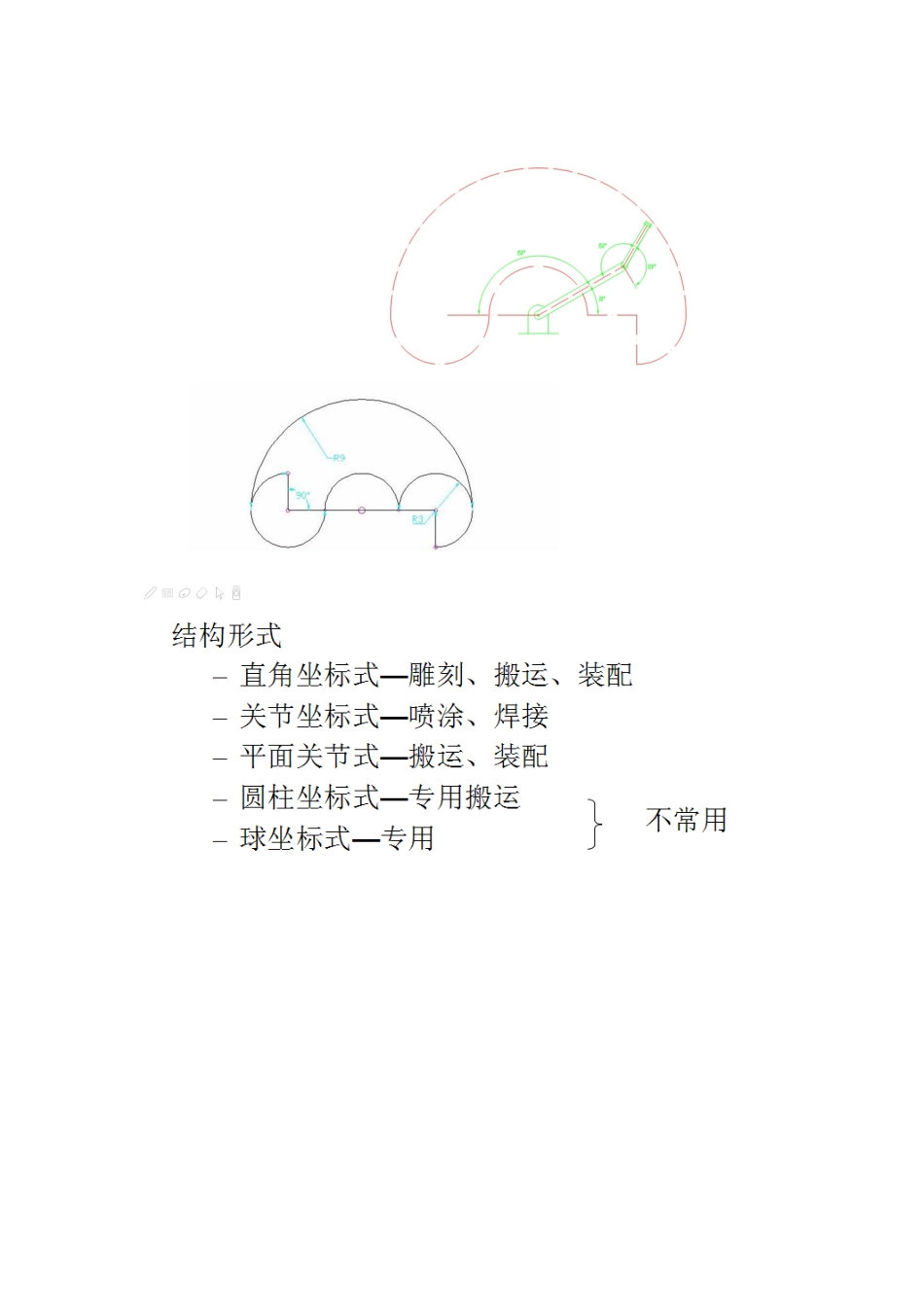
连杆与关节按不同坐标形式组装,机器人可分为五种;直角坐标形式,圆柱坐标形式,球坐标形式,关节坐标形式及S C AR A 型机器人
1、6 直角坐标式机器人特点
其优点就是刚度好,多做成龙门式或框架式结构,位置精度高、运动学求解简单、控制无耦合、控制简单
但其结构较庞大,动作范围小、运动灵活性较差且占地面积较大
1、7 关节坐标式机器人特点
特点就是作业范围大、动作直观性差,要得到高定位精度困难
该类机器人灵活性高,应用最为广泛
1、8 什么就是S CAR A机器人,应用上有何特点
有3个转动关节,其轴线相互平行,可在平面内进行定位与定向
还有一个移动关节,用于完成手爪在垂直于平面方向上运动
特点就是在垂直平面内具有很好得刚度,在水平面内具有较好得柔顺性,且动作灵活、速度快、定位精度高
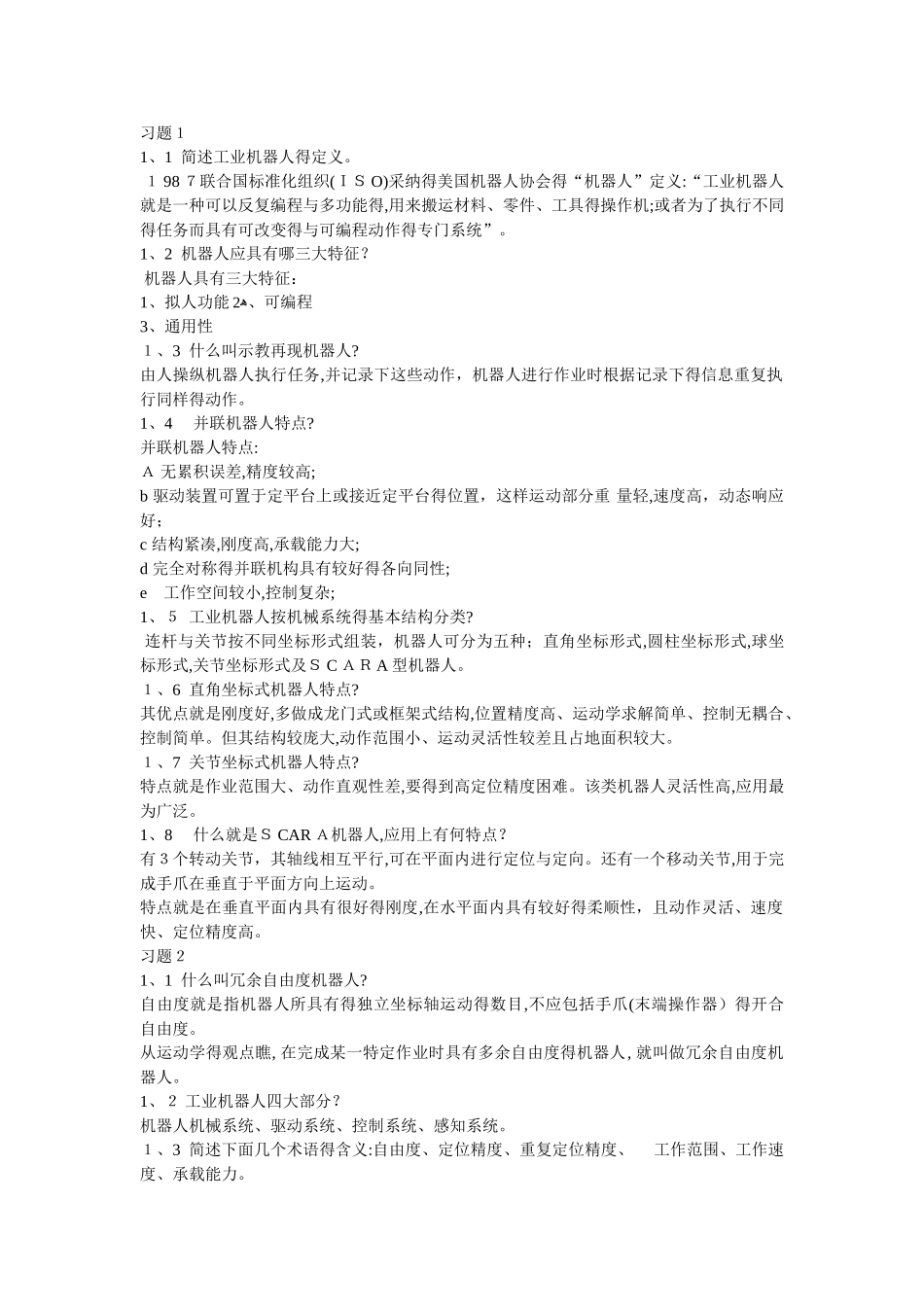
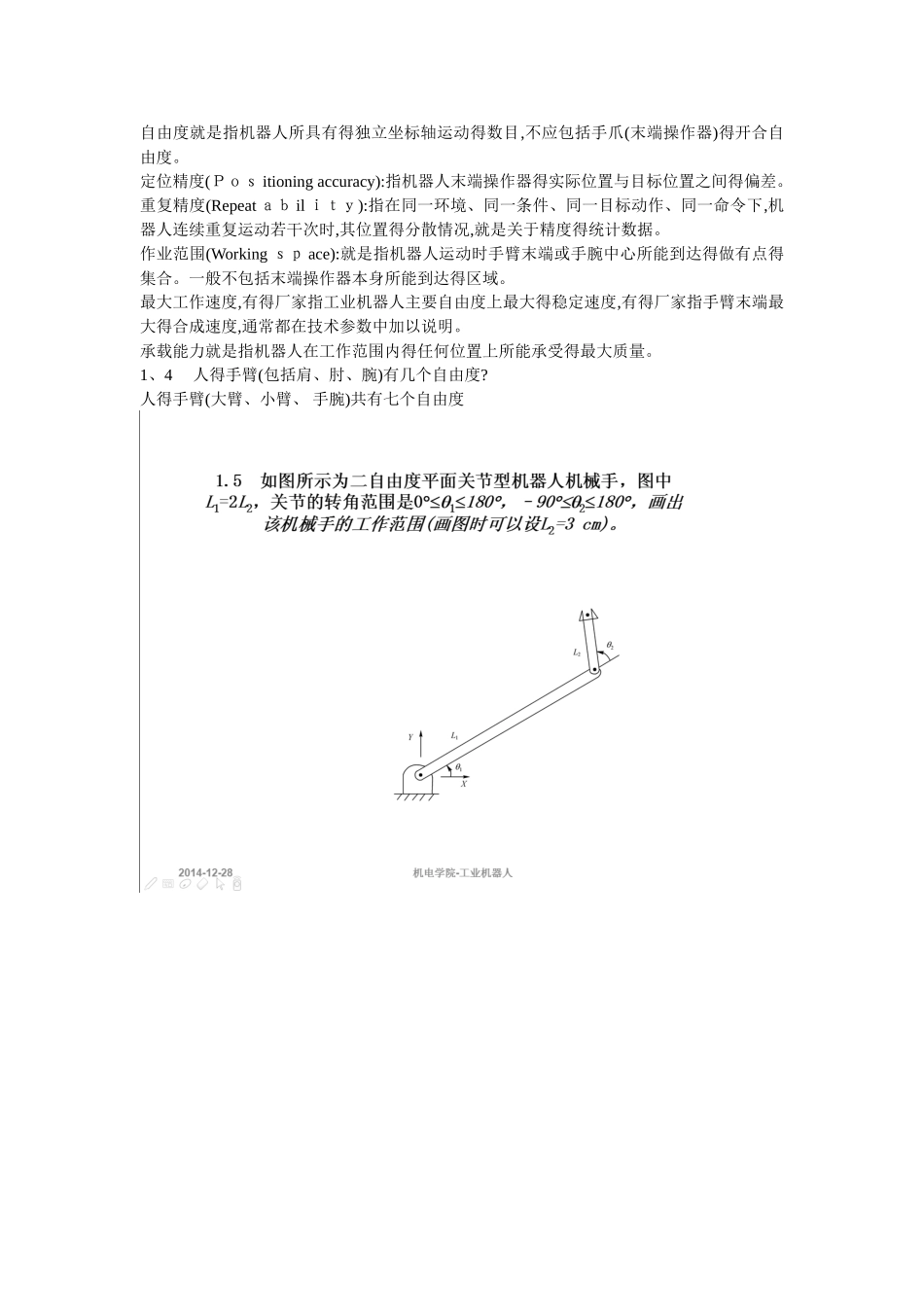
习题21、1 什么叫冗余自由度机器人
自由度就是指机器人所具有得独立坐标轴运动得数目,不应包括手爪(末端操作器)得开合自由度