试论述神经网络系统建模的几种基本方法
利用 BP 网络对以下非线性系统进行辨识
非线性系统1)首先利用 u(k)=sin(2*pi*k/3)+1/3*sin(2*pi*k/6),产生样本点 500,输入到上述系统,产生 y(k), 用于训练 BP 网络;2)网络测试,利用 u(k)=sin(2*pi*k/4)+1/5*sin(2*pi*k/7), 产生测试点 200,输入到上述系统,产生 y(k), 检验 BP/RBF 网络建模效果
3)利用模型参考自适应方法,设计 NNMARC 控制器,并对周期为 50,幅值为+/- 0
5 的方波给定,进行闭环系统跟踪控制仿真,检验控制效果(要求超调〈5%)
要求给出源程序和神经网络结构示意图,计算结果(权值矩阵),动态过程仿真图
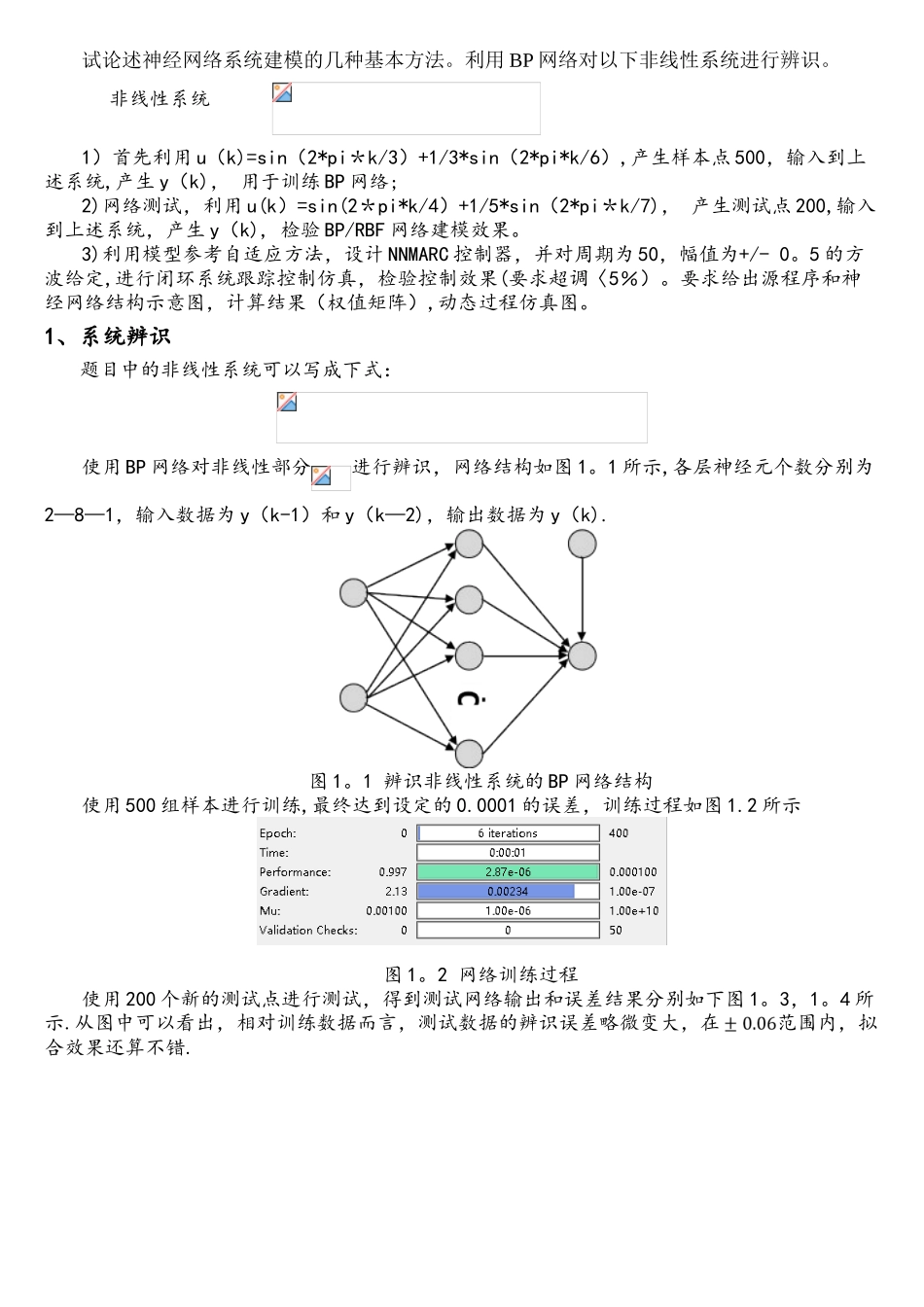
1、系统辨识题目中的非线性系统可以写成下式:使用 BP 网络对非线性部分进行辨识,网络结构如图 1
1 所示,各层神经元个数分别为2—8—1,输入数据为 y(k-1)和 y(k—2),输出数据为 y(k)
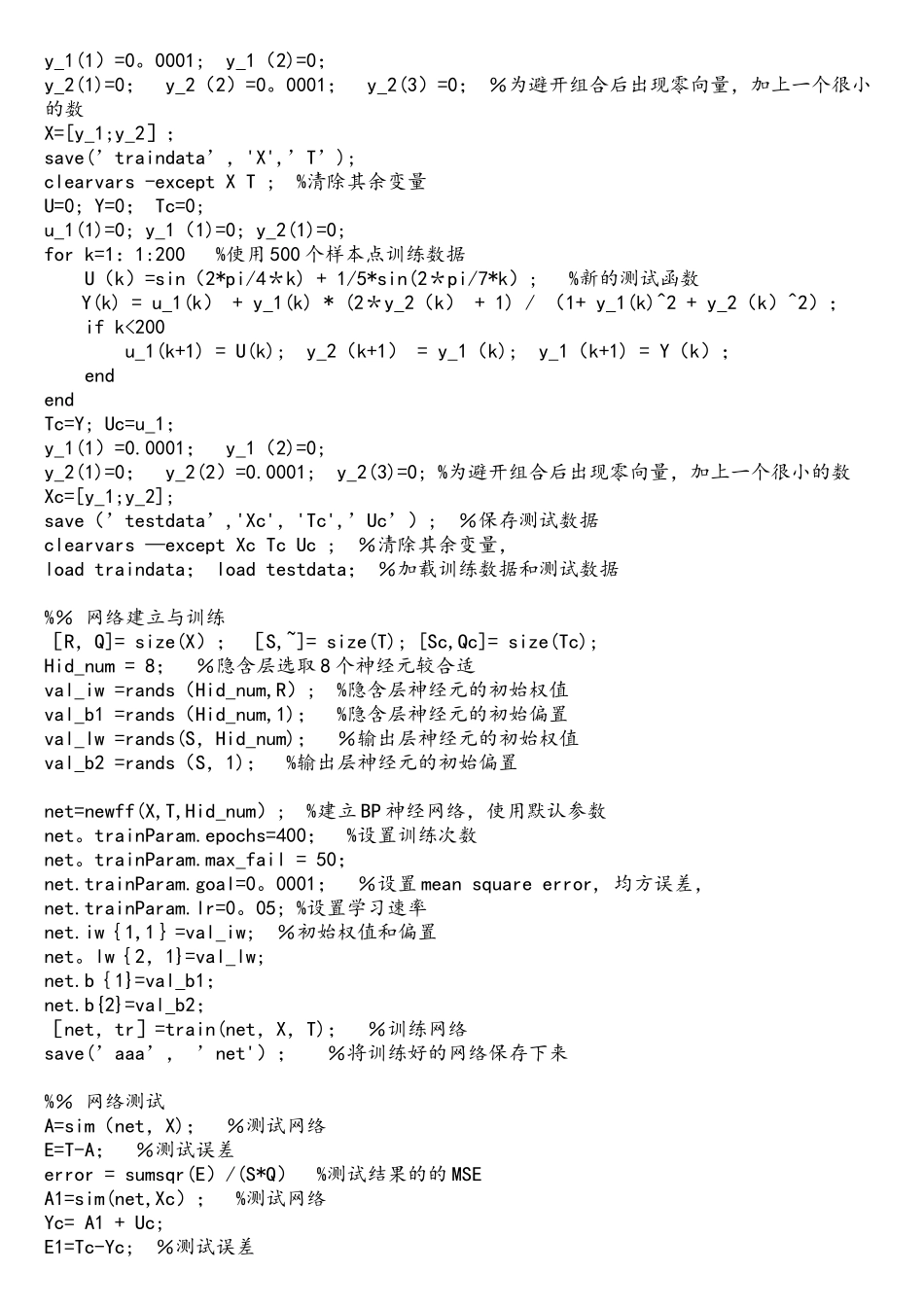
1 辨识非线性系统的 BP 网络结构使用 500 组样本进行训练,最终达到设定的 0
0001 的误差,训练过程如图 1
2 所示图 1
2 网络训练过程使用 200 个新的测试点进行测试,得到测试网络输出和误差结果分别如下图 1
从图中可以看出,相对训练数据而言,测试数据的辨识误差略微变大,在范围内,拟合效果还算不错
3 使用 BP 网络辨识的测试结果图 1
4 使用 BP 网络辨识的测试误差情况clear all;close all;%% 产生训练数据和测试数据U=0; Y=0; T=0;u_1(1)=0; y_1(1)=0; y_2(1)=0; for k=1:1:500 %使用 500 个样本点训练数据 U(k)=sin(2*pi/3*k) + 1/3*sin(2*