DSP 的运动目标图像跟踪算法与实现_工学基础 Karthik Hariharakrishnan and Dan Schonfeld, Senior Member, IEEE 摘要[本文为正文
以下开始确实是讨论了
] 我们提出一个目标跟踪快速算法---用运动矢量数据来推测目标物体轮廓
除了目标的初始化,在基于区域的方法中通用的分割步骤是能够幸免的
我们用遮挡/遮挡复原检测来更新目标轮廓,并用块向量推测目标边界从而实现跟踪
一种自适应的基于模板的方法差不多被用于估量帧间的物体运动
一种能高效的操纵帧间距的调制方案被用于运动估量
检测遮挡复原的算法分两步进行
第一,从帧差中估量未遮挡区域
遮挡和遮挡复原 视为二元事件并对它们的关系做出详细说明
依据二元性原理,将遮挡复原检测算法修改使之进展成为遮挡检测算法
该跟踪算法在运算方式上要优于现存的基于区域的目标跟踪方法
实现该该算法的程序采纳了 MPEG - 4 的视频压缩和基于 H
264 标准的内容检索
初步的仿真结果展现了该算法的表现
关键字:自适应运动估量, K-均值聚类, 分割,视觉跟踪
Ⅰ 序言 视觉跟踪差不多成为运算机视觉领域中被广泛讨论的一个课题
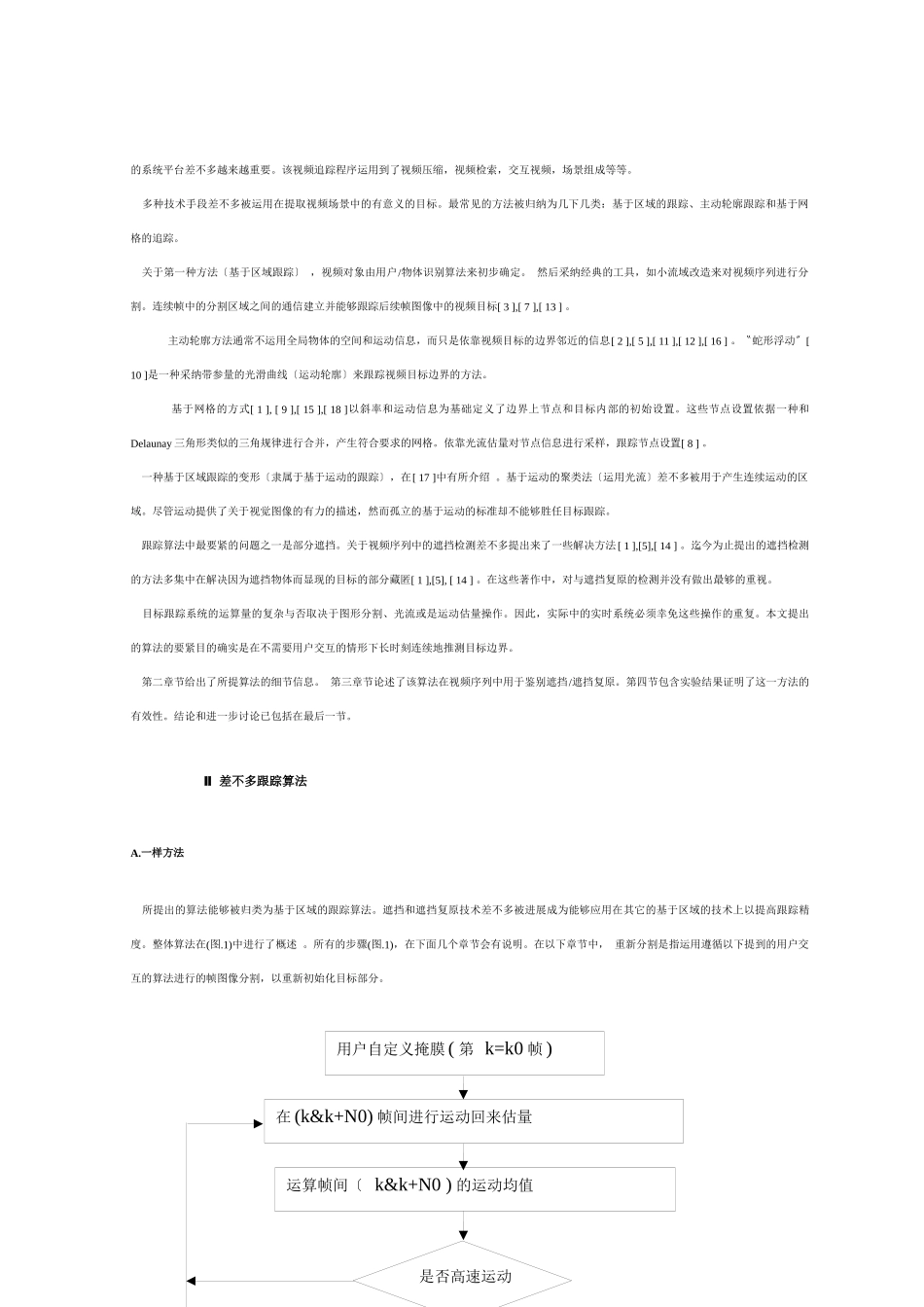
面对新兴多媒体标准如 MPEG - 4 的出台,进展一个能让视频跟踪高效运行的运算帧间〔 k&k+N0 ) 的运动均值用户自定义掩膜 ( 第 k=k0 帧 )在 (k&k+N0) 帧间进行运动回来估量是否高速运动的系统平台差不多越来越重要
该视频追踪程序运用到了视频压缩,视频检索,交互视频,场景组成等等
多种技术手段差不多被运用在提取视频场景中的有意义的目标
最常见的方法被归纳为几下几类:基于区域的跟踪、主动轮廓跟踪和基于网格的追踪
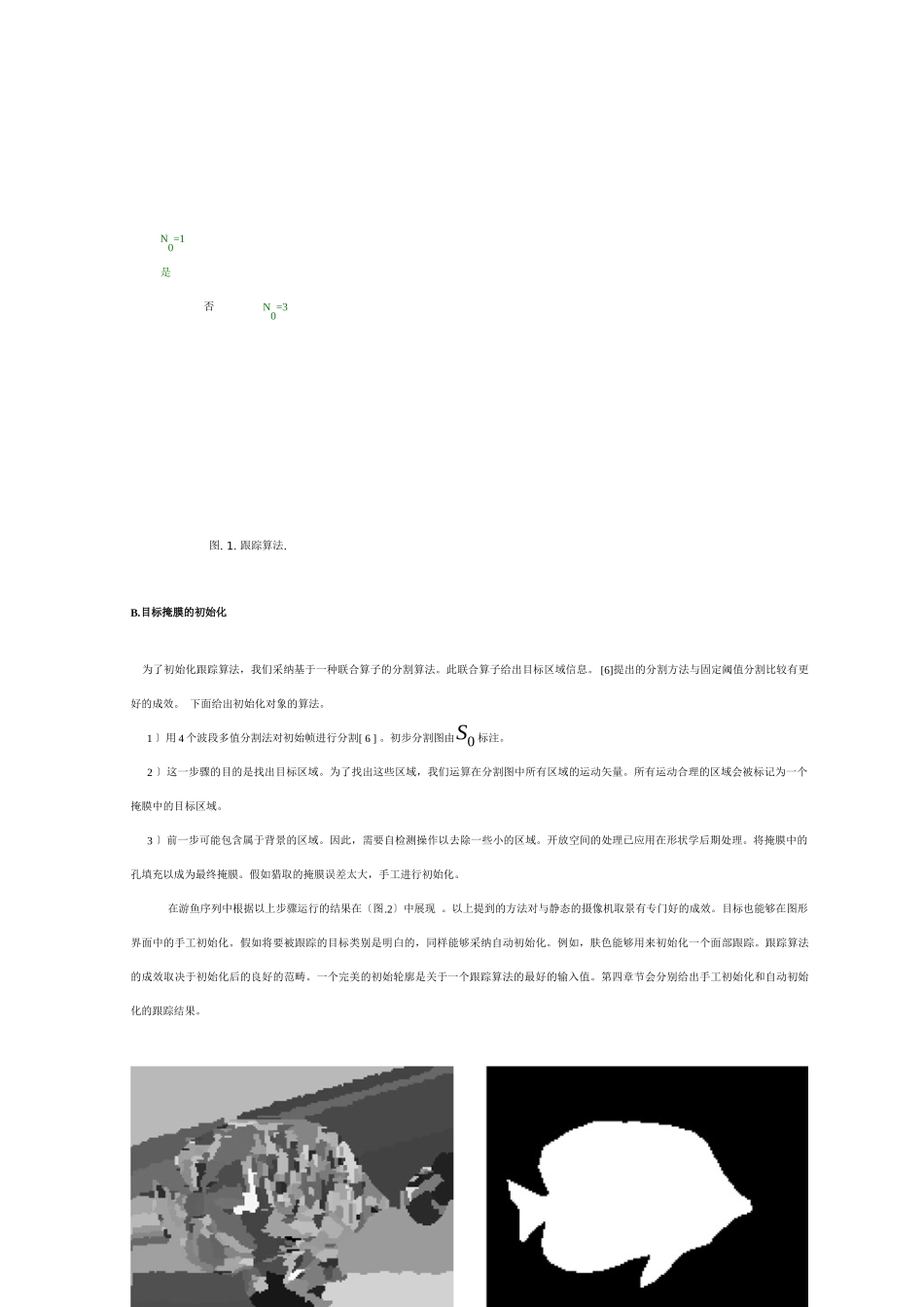
关于第一种方法〔基于区域跟踪〕 ,视频对象由用户/物体识别算法来初步确定
然后采纳经典的工具,如小流域改造来对视频序列进行分割