本工程采纳整体提升脚手架体系
1 脚手架的设计 根据两幢建筑物的平面形状、层高、结构形式和有关钢结构设计法律规范,进行仔细慎重的理论计算,确保脚手架的安全可靠和合理可行
1) 脚手架以 7~10t 电动葫芦为提升机,电动葫芦挂在用型钢制作的挑梁上,挑梁与建筑物的固定采纳螺栓,外端用斜拉杆与上层的相同部位固定
2) 架体设计为 4 个层高加一步护身栏的高度,脚手架为双排,宽为 1m,里排杆距结构外皮 0
5m,横杆和立杆间距为 1
8m,外侧为密目安全网全封闭,并以底部兜满
3) 架体沿建筑外围分成若干个单元,每个单元的宽度在 5~9m 之间,每个单元相连处的下面安装承力托
4) 架体底部采纳承力桁架,桁架的上下弦杆、斜腹杆均采纳双管,承力桁架两端座落在用型钢制作的承力托上
5) 承力托与建筑物的固定与葫芦挑梁相同
6) 使用期间架体与建筑物间应设置足够的拉结点,爬升期间,还应设置滑动拉结点或滑轮缆绳拉结点,并安装爬墙轮
7) 架体每次爬升一层
在爬升前先拆开承力托与建筑的连接点,此时架体荷载由电动葫芦及挑梁承受,架体爬升到位后安装承力托,使用期间架体荷载由承力托承受,并通过斜拉杆传递给建筑物
2 安装前的准备工程 1) 按平面图确定承力托及电动葫芦挑梁安装的位置和个数,在相应位置上的砼梁中预埋螺栓,并做到各层的位置上下一致
2) 加工制作型钢承力托、挑梁、斜拉杆,准备电动葫芦、钢丝绳、脚手管、扣件、安全网、木板、竹笆等
3) 搭设安装外脚手架,作为安装爬升架的承力托和搭设爬架的操作面
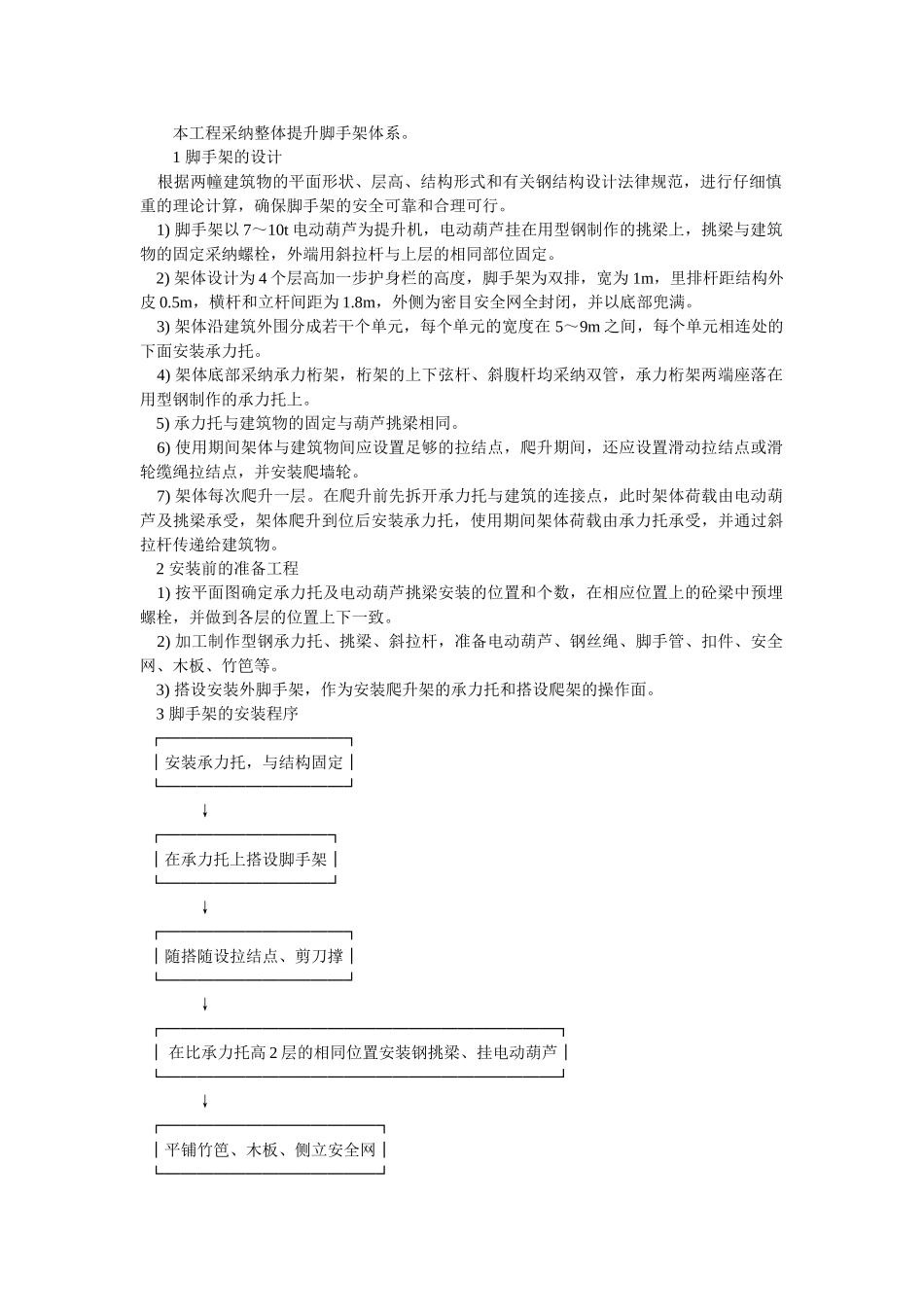
3 脚手架的安装程序 ┌───────────┐ │安装承力托,与结构固定│ └───────────┘ ↓ ┌──────────┐ │在承力托上搭设脚手架│ └──────────┘ ↓ ┌───────────┐ │随搭随设拉结点、剪刀撑│ └──────────