第 3 节 大显身手的传感器一、洗衣机水位控制装置全自动洗衣机的水位控制装置使用了压力传感器
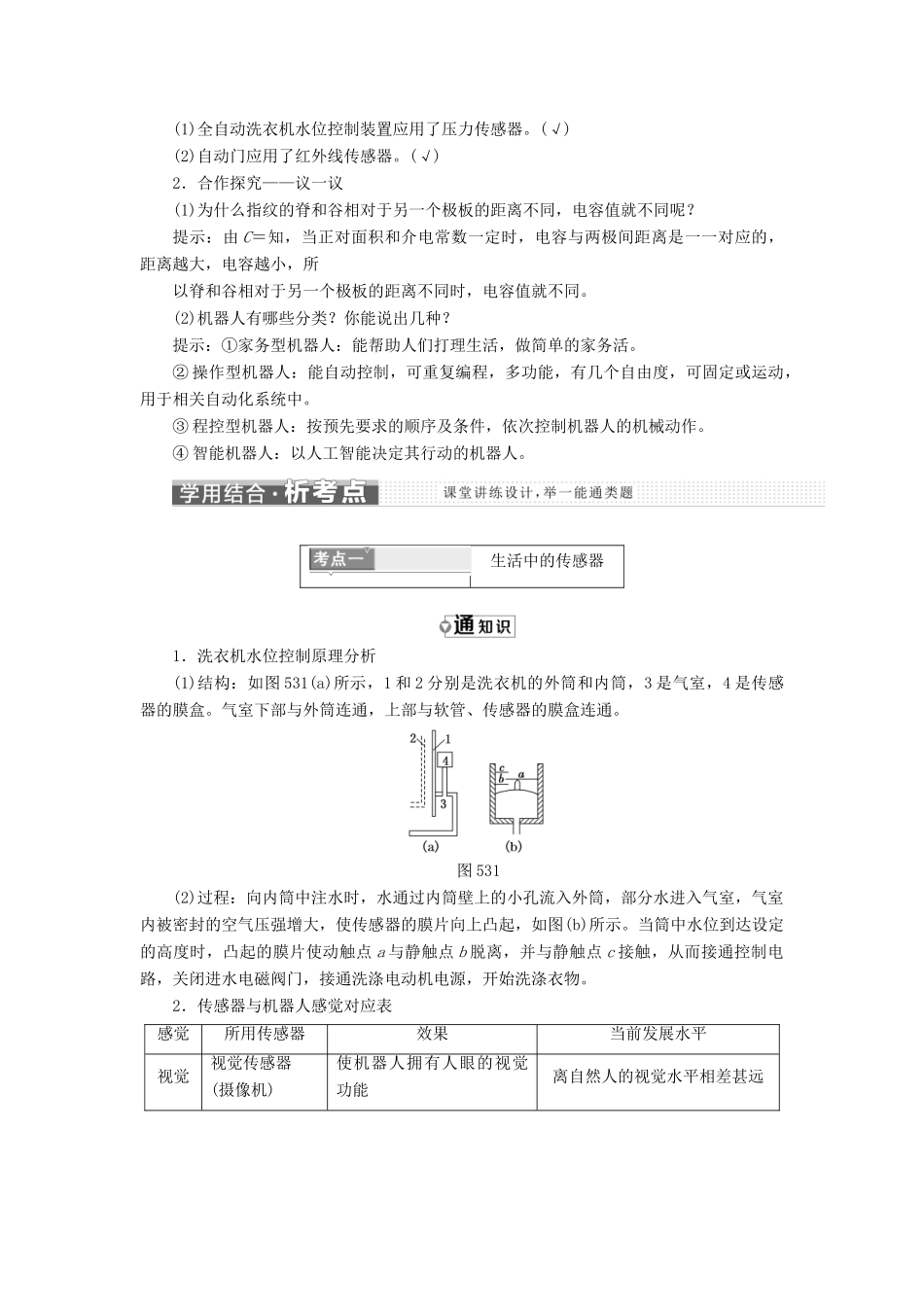
当水位达到设定的高度时接通控制电路关闭进水电磁阀门,接通洗涤电动机电源
二、自动门1.控制自动门开关的是一种红外线传感器
2.自动门工作流程:三、指纹识别器指纹识别器是通过电容传感器来识别指纹的
手指皮肤与电容传感器表面构成了电容器,由于指纹的凹凸导致不同位置的电容器的电容值也不相同
四、传感器与机器人1.机器人组成由机械系统、传感器系统、信息处理和控制系统组成
2.机器人传感器的分类分为外部传感器和内部传感器
3.传感器用途(1)外部传感器用于感知外部工作环境和外界事物对机器人的刺激
包括视觉传感器、超声波传感器、温度传感器、压力传感器、位移传感器等
(2)内部传感器(如角度传感器、关节传感器等),用于检测机器人自身的状态
1.自主思考——判一判1.洗衣机的水位控制是利用压力传感器将水的压力信号转化成电信号,实验电路的通断,相当于电路中的开关
2.自动门是利用红外传感器,人体发出的红外线被传感器接收产生电压输出信号,指纹识别器是利用电容式传感器,传感器表面是电容器的一极,手指的皮肤是另一极,指纹的脊和谷造成电容器电容的差异获取指纹信息
3.机器人由机械系统、传感系统、信息处理系统和控制系统组成,其传感器分为外部传感器和内部传感器
(1)全自动洗衣机水位控制装置应用了压力传感器
(√)(2)自动门应用了红外线传感器
(√)2.合作探究——议一议(1)为什么指纹的脊和谷相对于另一个极板的距离不同,电容值就不同呢
提示:由 C=知,当正对面积和介电常数一定时,电容与两极间距离是一一对应的,距离越大,电容越小,所以脊和谷相对于另一个极板的距离不同时,电容值就不同
(2)机器人有哪些分类
你能说出几种
提示:①家务型机器人:能帮助人们打理生活,做简单的家务活
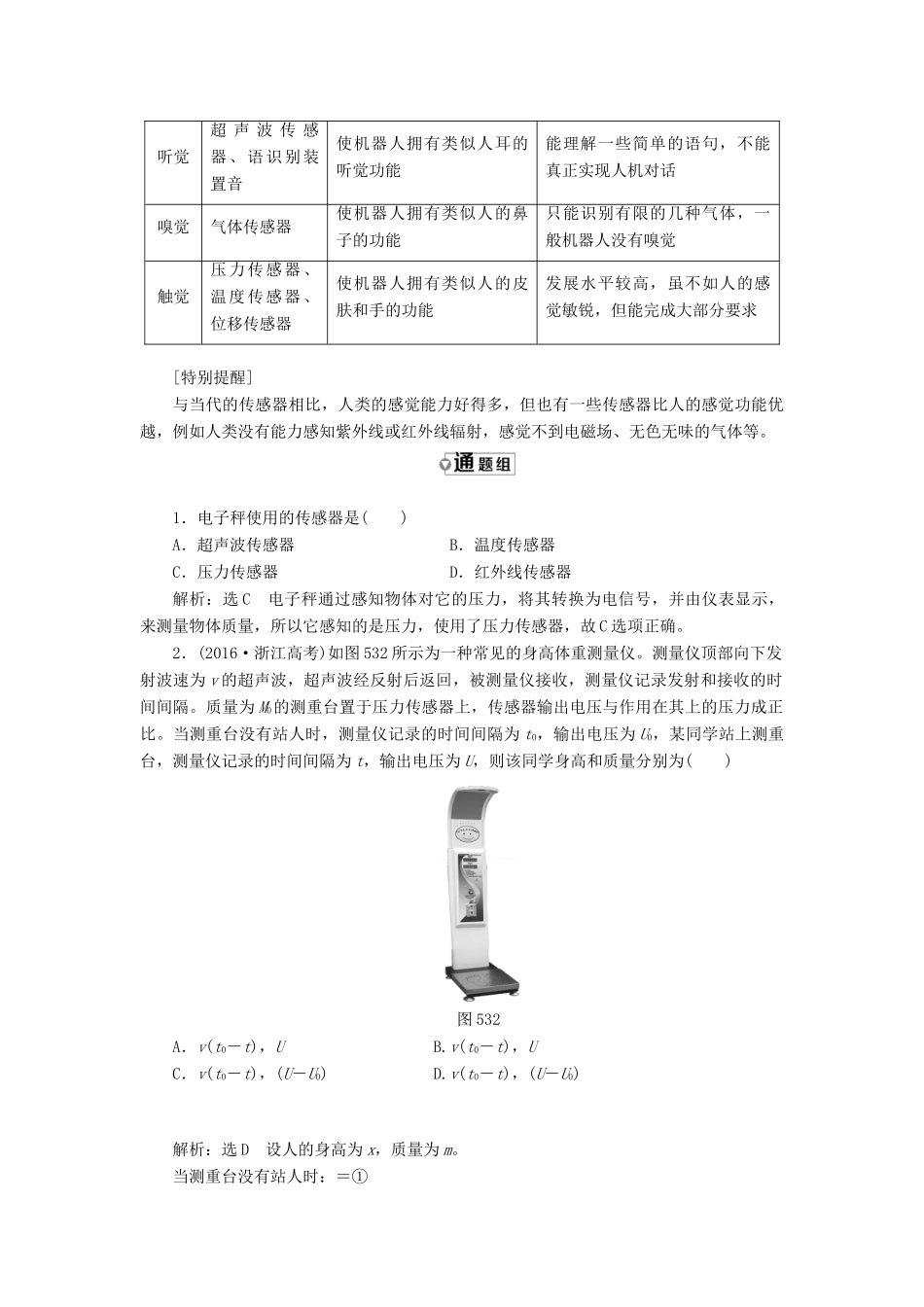
② 操作型机器人:能自动控制,