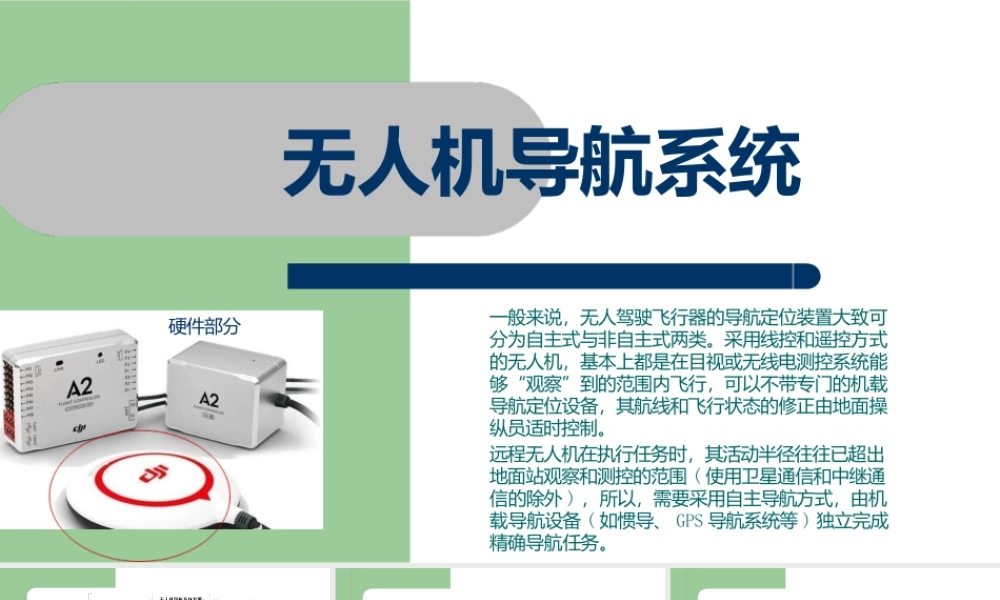
一般来说,无人驾驶飞行器的导航定位装置大致可分为自主式与非自主式两类
采用线控和遥控方式的无人机,基本上都是在目视或无线电测控系统能够“观察”到的范围内飞行,可以不带专门的机载导航定位设备,其航线和飞行状态的修正由地面操纵员适时控制
远程无人机在执行任务时,其活动半径往往已超出地面站观察和测控的范围 ( 使用卫星通信和中继通信的除外 ) ,所以,需要采用自主导航方式,由机载导航设备 ( 如惯导、 GPS 导航系统等 ) 独立完成精确导航任务
无人机导航系统硬件部分6
1 导航概述1
无人机导航技术发展现状6
1 导航概述2
常见的几类导航系统单一导航:组合导航卫星导航系统多普勒导航惯性导航系统(INS) 图形匹配导航系统无线电跟踪系统 地磁导航天文导航INS/GPS 组合导航系统 惯导 / 多普勒组合导航系统惯导 / 地磁组合导航系统惯导 / 地形匹配组合导航系统 GPS/ 航迹推算组合导航系统6
1 导航概述6
1 惯性导航技术惯性导航( inertial navigation ):通过测量飞行器的加速度,并自动进行积分运算,获得飞行器瞬时速度和瞬时位置数据的技术
惯性导航系统属于一种推算导航方式
即从一已知点的位置根据连续测得的运载体航向角和速度推算出其下一点的位置.因而可连续测出运动体的当前位置
惯性导航系统中的陀螺仪用来形成一个导航坐标系使加速度计的测量轴稳定在该坐标系中并给出航向和姿态角;加速度计用来测量运动体的加速度经过对时间的一次积分得到速度,速度再经过对时间的一次积分即可得到距离
1 导航概述6
1 惯性导航技术1 、发展17 世纪,牛顿研究了高速旋转刚体的力学问题
牛顿力学定律是惯性导 航的理论基础
1852 年傅科称这种刚体为陀螺,后来制成供姿态测量用的陀 螺仪
1906 年 H
安休兹制成陀螺方向仪,其自转轴能指向固定的方向