用DIS验证机械能守恒定律的三种方法一、用斜轨法验证机械能守恒定律◆实验目的用斜轨法验证机械能守恒定律
◆实验原理位于倾斜轨道上的小车,忽略轨道的摩擦力,因只有重力对其做功,所以机械能守恒
取低处光电门传感器(接数据采集器第二通道)为零势点,设两光电门之间的高差为h,则:在两光电门传感器处小车的机械能分别为:,若为两光电门问的距离,为轨道两支脚之间的距离,S为轨道一个支脚调高高度:为本支脚平衡摩擦后高度,则公式中本实验中,“I”型挡光片的宽度为0.02m,小车的质量为0
2345kg,L1=0
50m,L2=1
OOm,S=0
037m,S'=0
013m,所以h=0
两光电门传感器处机械能损耗的计算公式为:◆实验器材朗威DISLab、计算机、DISLab力学轨道及附件、天平等
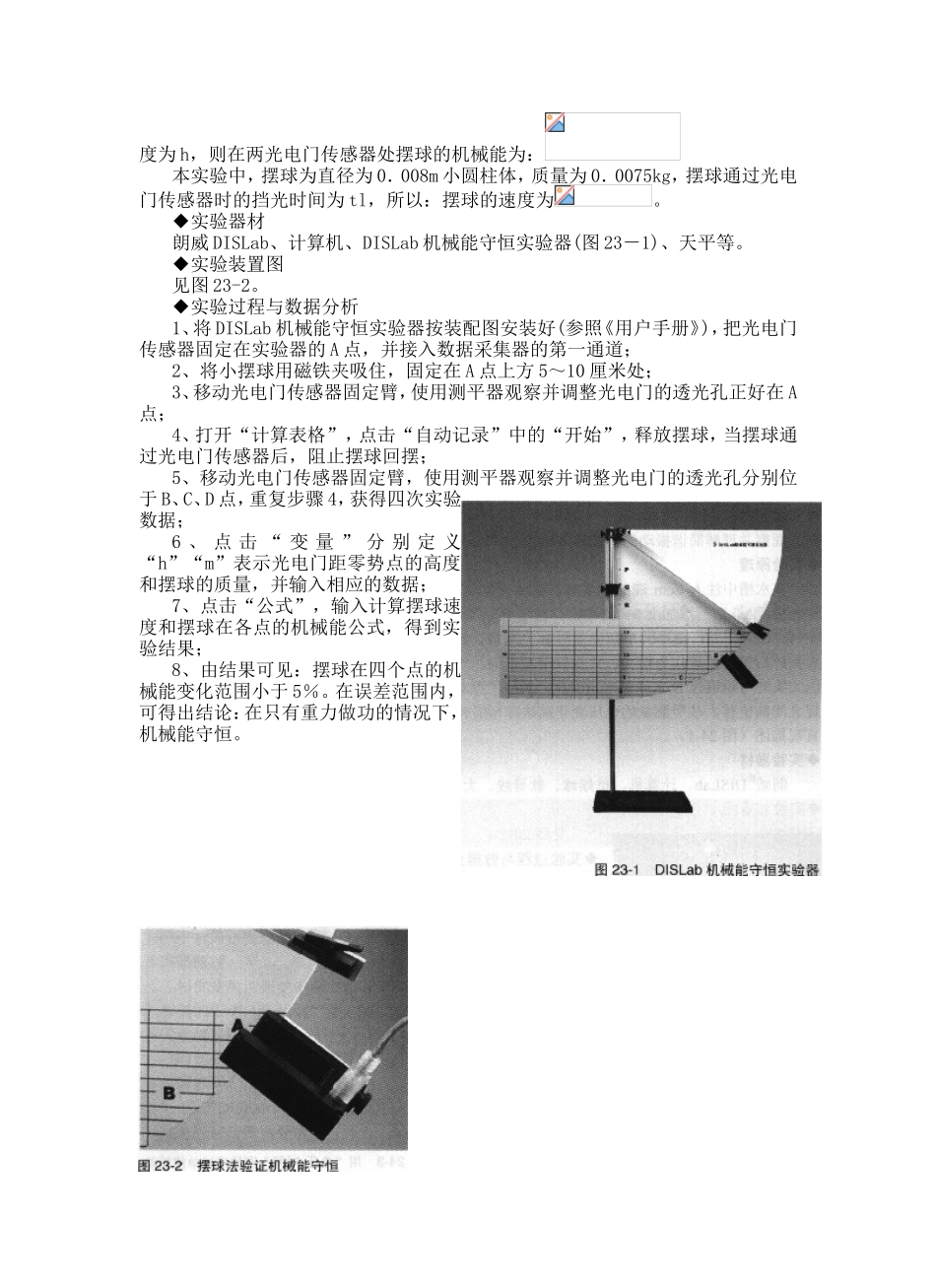
◆实验装置图见图22.1
◆实验过程与数据分析l、将力学轨道调节水平,把一侧调高3
7cm,按0
5米间距安装两光电门;2、将两光电门接入数据采集器第一、二通道;3、打开“计算表格”,点击“自动记录”中的“开始”,让小车自由向下滑动5~6次,点击停止;4、点击“公式”,输入变量和计算公式,得到计算结果;5、由结果可见:六次实验中机械能损失仅在1
90%之间;6、进一步改进实验手法,精细调节力学轨道垫高的角度,平衡摩擦力,可大幅度提高实验精度,得到图22-3所示的计算结果,机械能的损失已控制在千分之一以内;7、由此可得出结论:在只有重力做功的情况下,机械能守恒
二、用气垫导轨法验证机械能守恒定律◆实验器材朗威DISLab、计算机、气垫导轨、天平等
◆实验目的用气垫导轨法验证机械能守恒定律
◆实验装置图见图22-4
◆实验过程与数据分析1、将气垫导轨调节水平,把一个支脚调高2
4cm,(也可先安装,测量出角度后修改公式),按0
5米间距安装两光电门:2、将两光电门接入数据采集器第一