华南农业大学期末考试试卷(A卷)2007学年第1学期考试科目:自动控制原理II考试类型:闭卷考试时间:120分钟学号姓名年级专业题号12345678910总分得分评阅人1、已知下图电路,以电源电压u(t)为输入量,求以电感中的电流和电容中的电压作为状态变量的状态方程,和以电阻R2上的电压为输出量的输出方程
并画出相应的模拟结构图
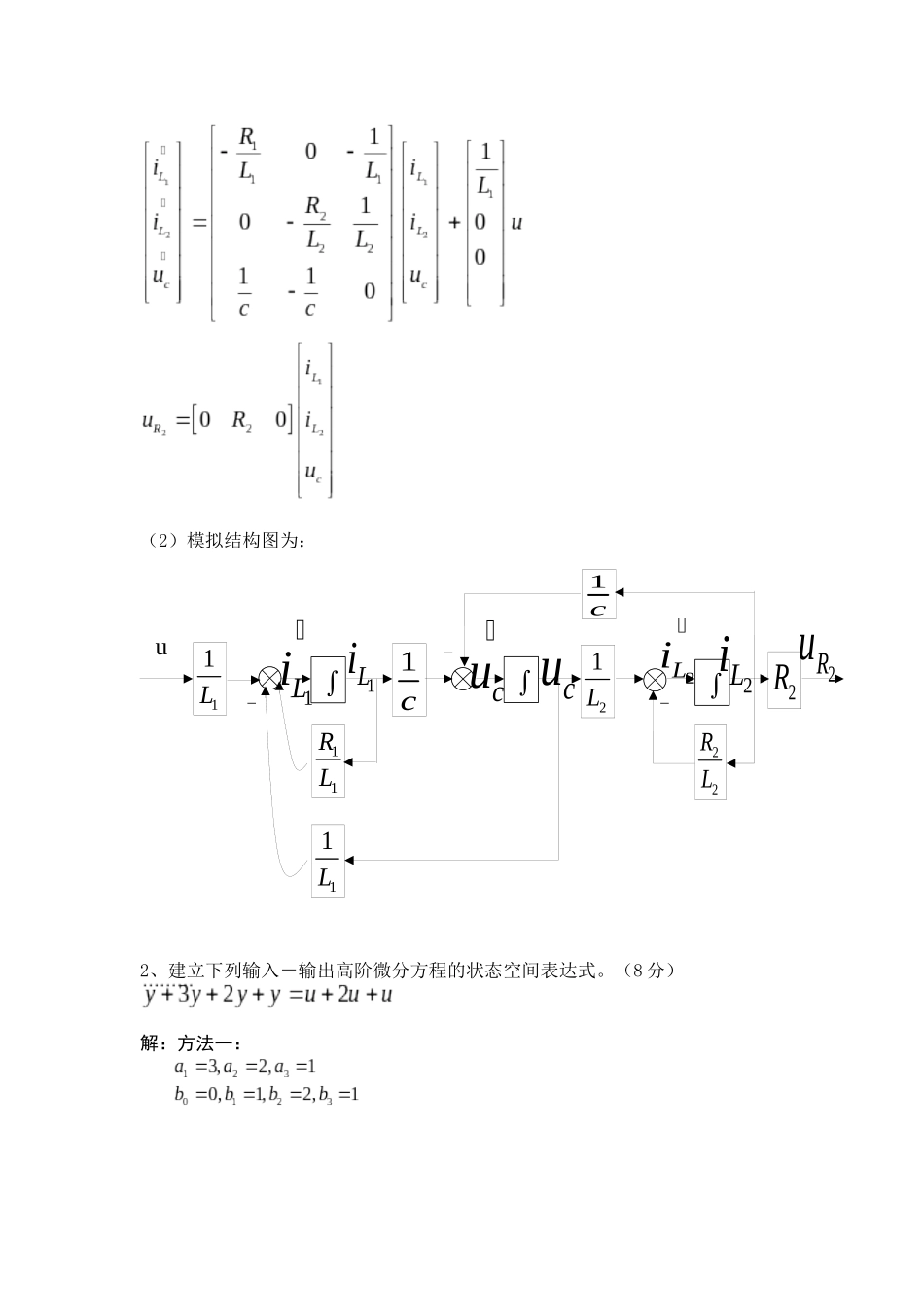
(10分)解:(1)由电路原理得:11L1c1c21L2R1Li1Licucu2Li2Li11RL11L22RL____u2Ru(2)模拟结构图为:2、建立下列输入-输出高阶微分方程的状态空间表达式
(8分)解:方法一:方法二:3、将下列状态空间表达式化为对角标准型,并计算其传递函数(10分)解:(1)(2)4、求定常控制系统的状态响应(10分)解:5、设系统的状态方程及输出方程为试判定系统的能控性和能观性
(10分)解:(1),秩为2,系统状态不完全能控
(2),秩为2系统状态不完全能观
6、已知系统˙x=[1100]x+[11]u试将其化为能控标准型
(10分)解:,能控标准型为˙x=[0101]x+[01]u7、应用Lyapunov第一方法分析非线性系统在平衡状态的稳定性(10分)解:(1)求平衡点所以平衡点为:(0,0)(2)雅克比矩阵为对平衡点(0,0),系数矩阵,其特征值为:-1,-1,所以平衡点(0,0)是渐进稳定的;8、已知系统的状态方程为试从李亚普诺夫方程解出矩阵P,来判断系统的稳定性
(10分)解:令由得P11=5/4,P12=1/4,P22=1/4,可知P是正定的
因此系统在原点处是大范围渐近稳定的
9、已知系统˙x=[01000100−3]x+[001]uy=[110]x求使系统极点配置到-1,-2,-3的状态反馈阵K
并说明其配置新极点后的状态能控性及能观测性
(12分)解:(1)系统完全能控,可用状态反馈任意