第1页共6页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共6页投标书组员:程浩洋,赵振才太阳光跟踪系统设计1
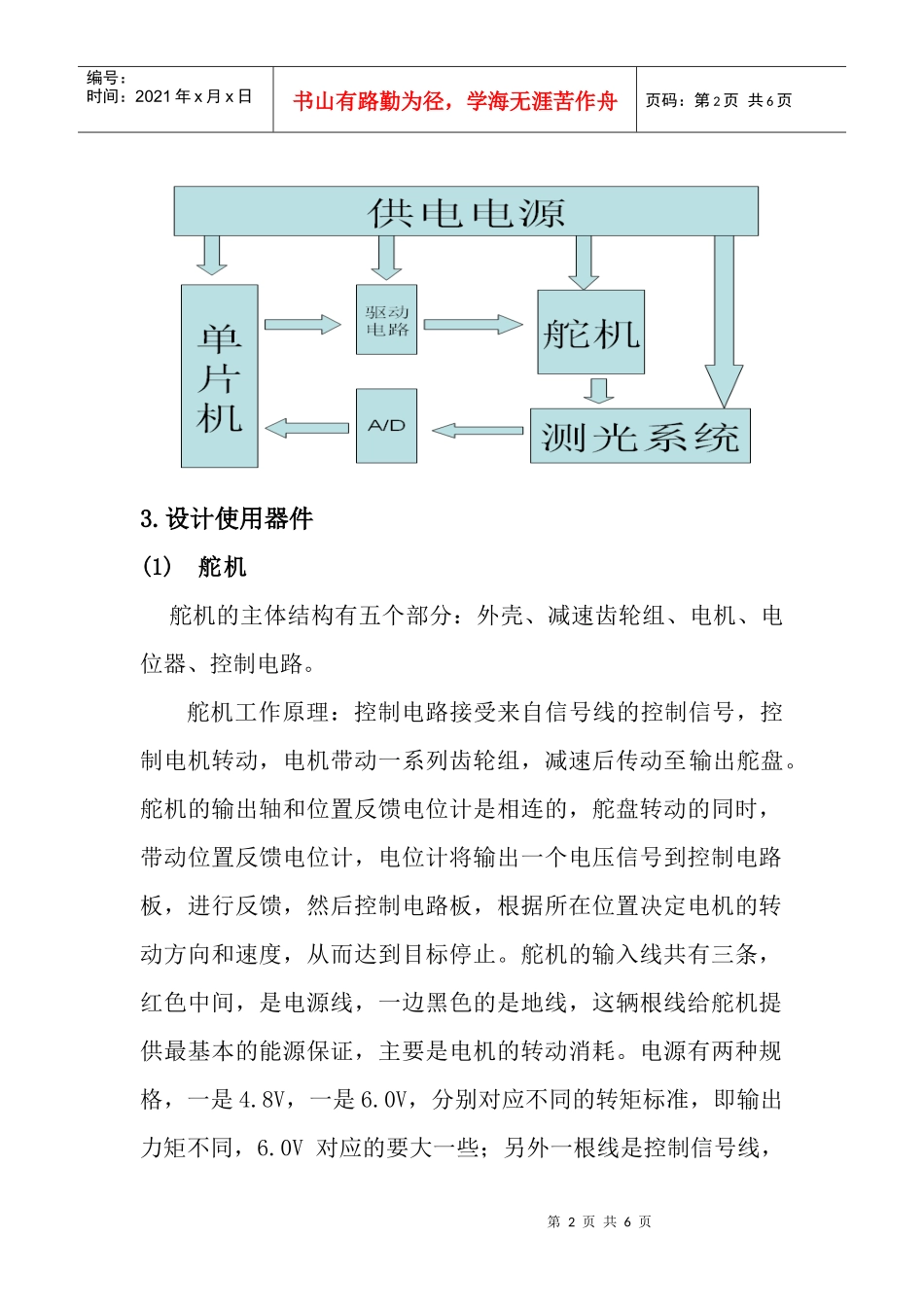
设计原理本设计利用光敏电阻构成的测光电路或太阳能电池板对太阳光方向进行检测,光强越强电阻的阻值越小,从而改变电流的大小,将检测到的光强度大小的模拟信号传给A/D转换器,得到所需的数字信号再传给51单片机,通过事先编好的程序得到方波,最后利用得到的PWM波,控制舵机并调整到正对太阳光的方向,即实现了对太阳光的跟踪;太阳的方位在一天的时间中总是在改变,能始终捕获到太阳的方向,就相当于可以提高接收光能的时间,这样就可以尽可能多的获取太阳能
(可以通过事先收集到的当地每个季节不同时段太阳的运行规律,经过编程,大体先找到实时实地太阳的大体位置,然后再经过以下系统设定,寻找到所需精确的太阳光功率最大位置)2
设计框架第2页共6页第1页共6页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共6页3
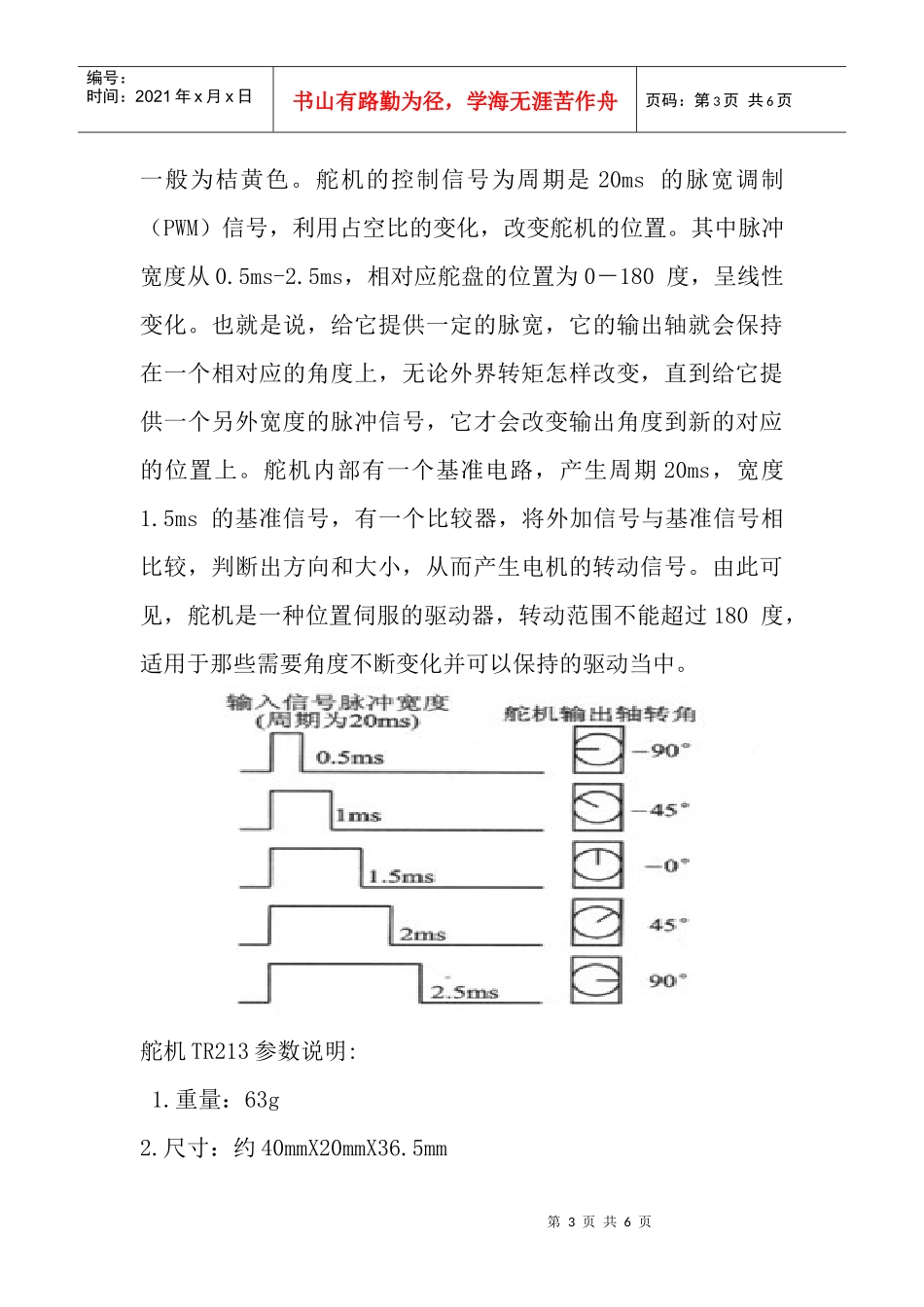
设计使用器件(1)舵机舵机的主体结构有五个部分:外壳、减速齿轮组、电机、电位器、控制电路
舵机工作原理:控制电路接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘
舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板,根据所在位置决定电机的转动方向和速度,从而达到目标停止
舵机的输入线共有三条,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗
电源有两种规格,一是4
8V,一是6
0V,分别对应不同的转矩标准,即输出力矩不同,6
0V对应的要大一些;另外一根线是控制信号线,第3页共6页第2页共6页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第3页共6页一