上海大学本科学士学位毕业设计论文激光导航运载机器人运行环境和引导环境的中文动态画面输入软件作者:查嵩炜学号:99103666专业:计算机科学与技术指导老师:朱颖目录摘要AGV系统是集光,机,电,计算机与一体的高新技术,是柔性化,智能化程度极高的输送系统,可广泛应用于生产线、仓库、商场、机场等物资运输场所
自从AGV问世以来,各种各样的制导方式相继被用在AGV上,这些制导方式可归纳为固定线路和非固定线路两类
目前在工业上实用的制导方式主要有下面几种:固定路线(磁性、光学、电磁感应)
非固定路线——激光扫描
随着生产力和工业自动化水平的日益提高,物流系统中所蕴藏的巨大潜力将越来越引起人们的重视,开发物流潜力,提高生产的总体效益已经成为现代化生产的重要标志之一
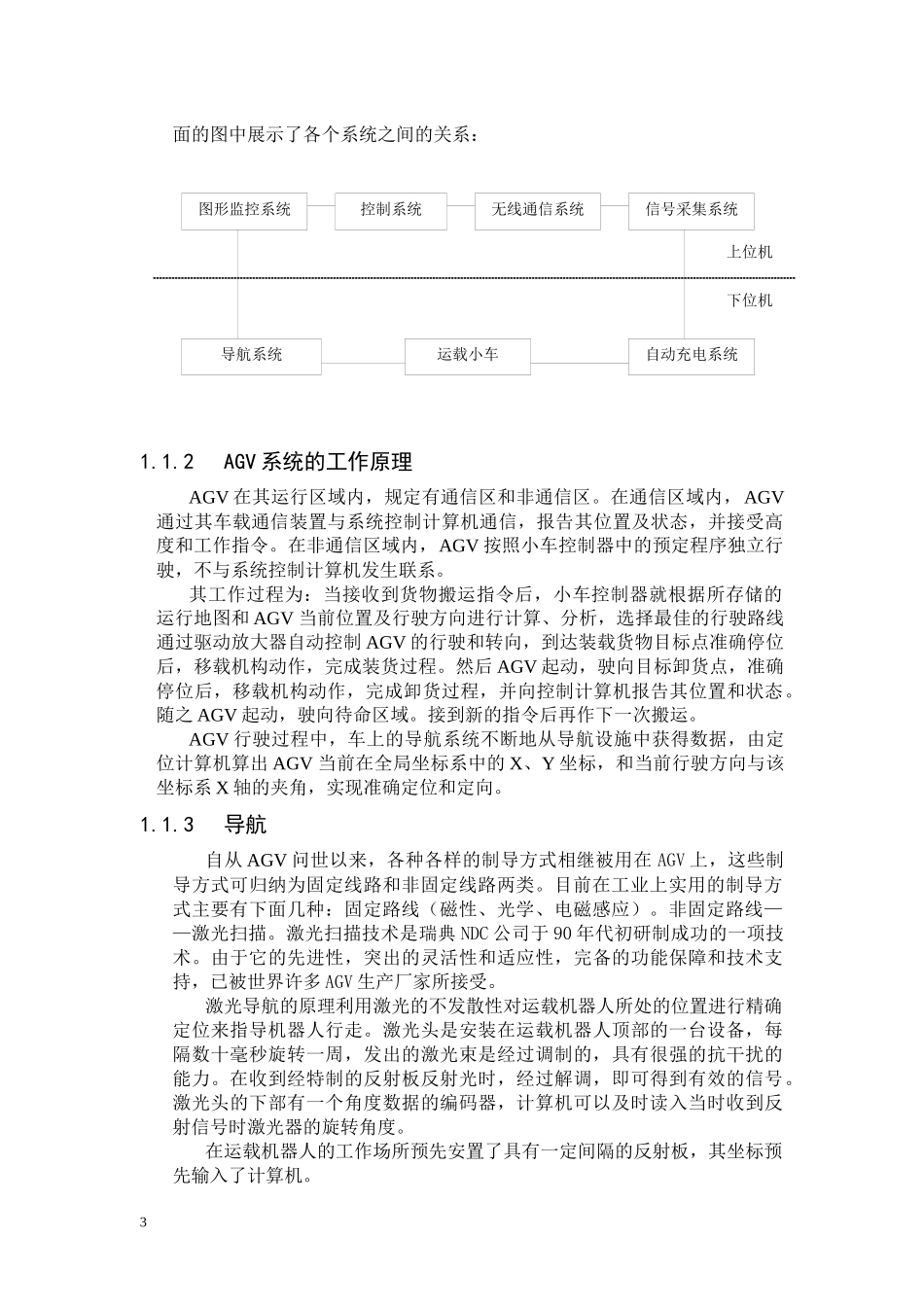
AGV系统可划分为两个组成部分,上位机模块——确定运载小车的行为,并提供监控服务;下位机模块——实施对运载小车的物理控制
本系统是基于Windows平台,运行于上位机的软件系统,采用VISUALBASIC6
0编写,实现了对运载小车运行环境、行走轨迹的实时创建、修改和管理
使AGV系统变得更科学、合理、方便,提高了企业的管理效率
同时为了使系统的使用者能够方便得使用软件,系统的用户界面简单、明了、美观大方、容易操作使用
通过对软件系统从无到有,逐渐建立起来的过程的介绍,读者还可以体会到采用软件工程思想的必要性以及用类的思想创建软件的优越性
ABSTRACTTheAGVsystemisanewtechnologywhichcollectedoptics,machine,electricity,computer,andisaflexible,hasextremelyhighintelligentdegreeconveyersystem
Itcanbeapplytothegoodsandmaterialstransportfie