实验三数字PID控制一、实验目的1.研究PID控制器的参数对系统稳定性及过渡过程的影响
2.研究采样周期T对系统特性的影响
3.研究I型系统及系统的稳定误差
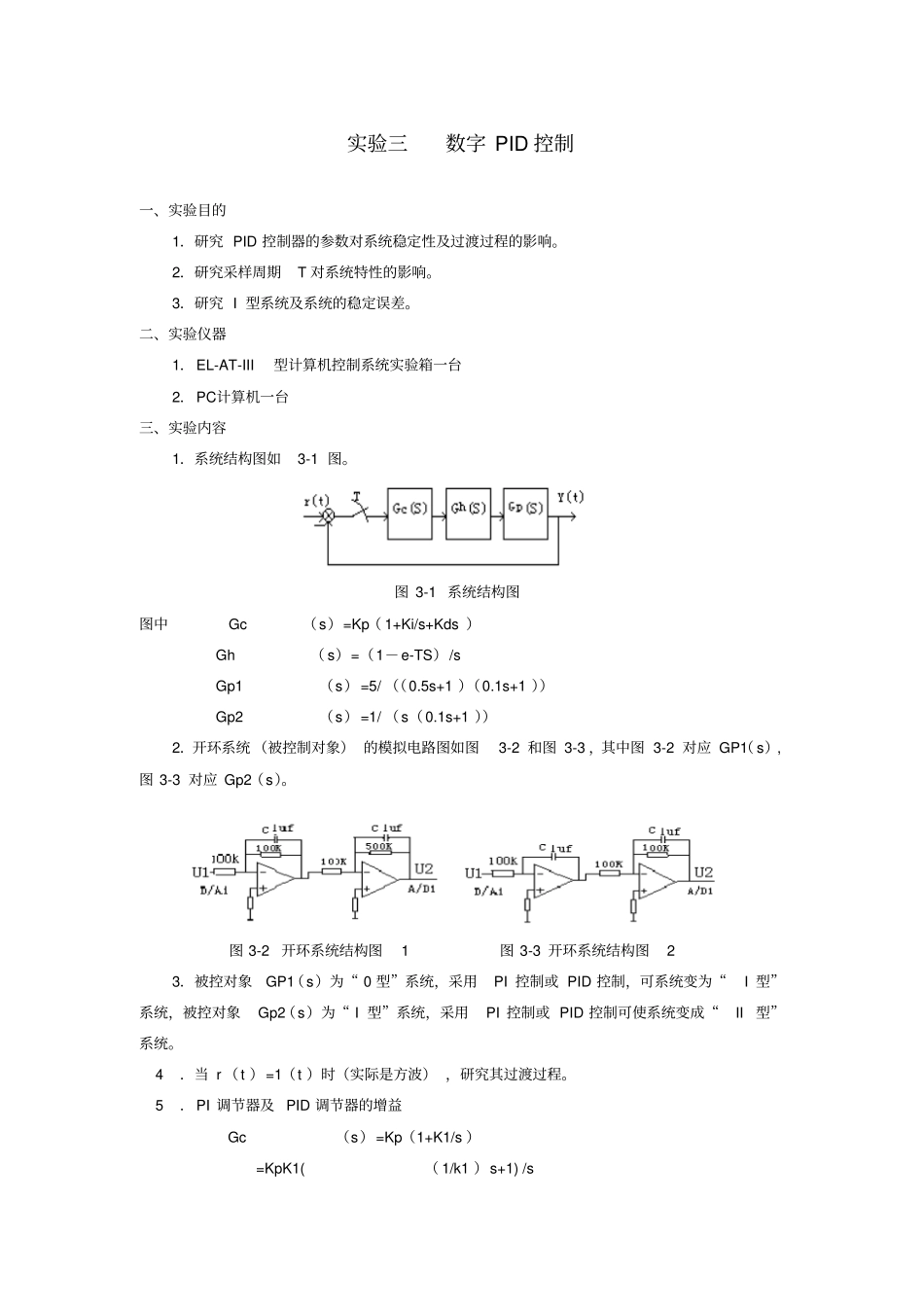
二、实验仪器1.EL-AT-III型计算机控制系统实验箱一台2.PC计算机一台三、实验内容1.系统结构图如3-1图
图3-1系统结构图图中Gc(s)=Kp(1+Ki/s+Kds)Gh(s)=(1-e-TS)/sGp1(s)=5/((0
5s+1)(0
1s+1))Gp2(s)=1/(s(0
1s+1))2.开环系统(被控制对象)的模拟电路图如图3-2和图3-3,其中图3-2对应GP1(s),图3-3对应Gp2(s)
图3-2开环系统结构图1图3-3开环系统结构图23.被控对象GP1(s)为“0型”系统,采用PI控制或PID控制,可系统变为“I型”系统,被控对象Gp2(s)为“I型”系统,采用PI控制或PID控制可使系统变成“II型”系统
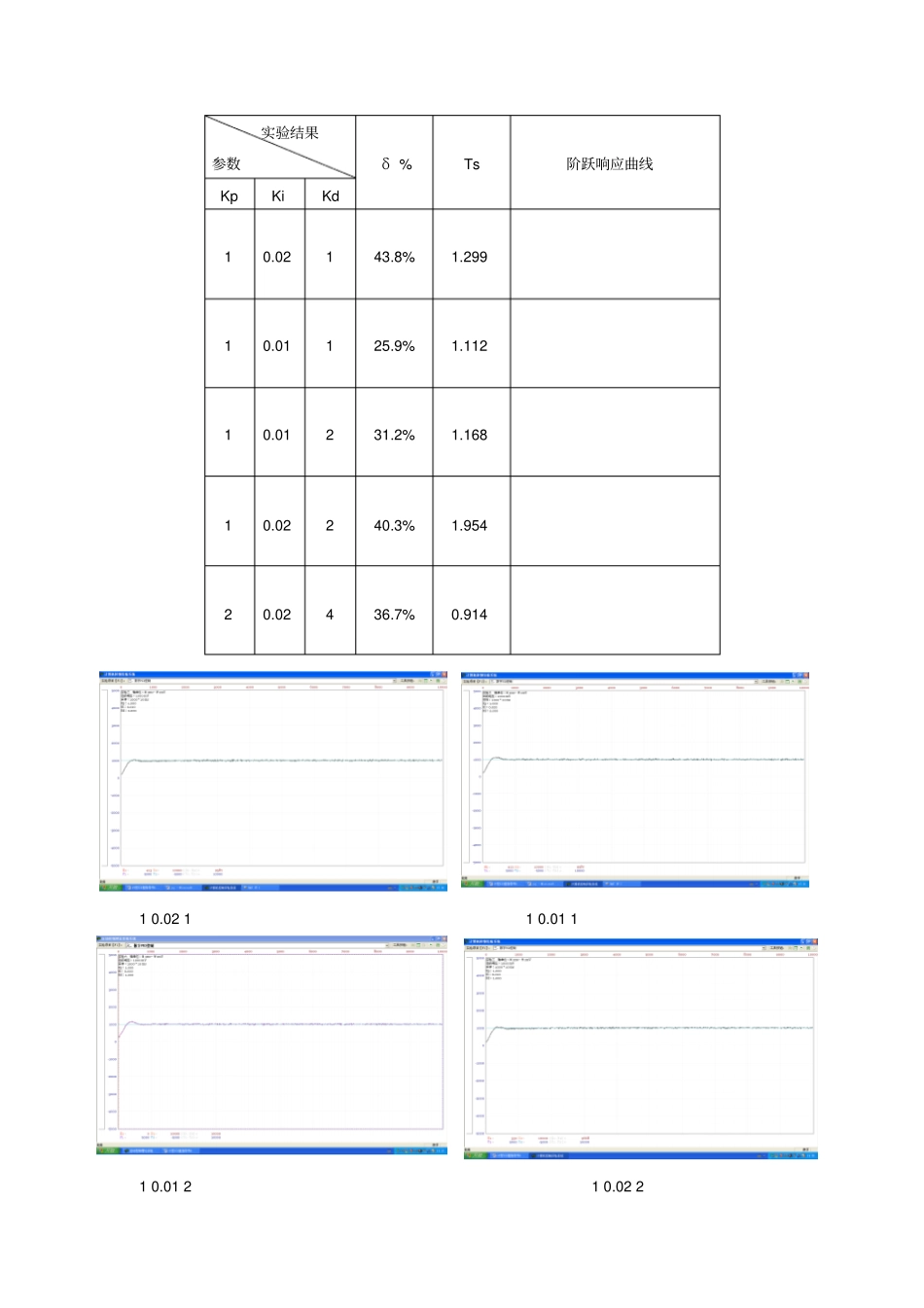
4.当r(t)=1(t)时(实际是方波),研究其过渡过程
5.PI调节器及PID调节器的增益Gc(s)=Kp(1+K1/s)=KpK1((1/k1)s+1)/s=K(Tis+1)/s式中K=KpKi,Ti=(1/K1)不难看出PI调节器的增益K=KpKi,因此在改变Ki时,同时改变了闭环增益K,如果不想改变K,则应相应改变Kp
采用PID调节器相同
6.“II型”系统要注意稳定性
对于Gp2(s),若采用PI调节器控制,其开环传递函数为G(s)=Gc(s)·Gp2(s)=K(Tis+1)/s·1/s(0
1s+1)为使用环系统稳定,应满足Ti>0